 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvaluating Zero-Shot and One-Shot Adaptation of Small Language Models in Leader-Follower Interaction
Feb 26, 2026Leader-follower interaction is an important paradigm in human-robot interaction (HRI). Yet, assigning roles in real time remains challenging for resource-constrained mobile and assistive robots. While large language models (LLMs) have shown promise for natural communication, their size and latency limit on-device deployment. Small language models (SLMs) offer a potential alternative, but their effectiveness for role classification in HRI has not been systematically evaluated. In this paper, we present a benchmark of SLMs for leader-follower communication, introducing a novel dataset derived from a published database and augmented with synthetic samples to capture interaction-specific dynamics. We investigate two adaptation strategies: prompt engineering and fine-tuning, studied under zero-shot and one-shot interaction modes, compared with an untrained baseline. Experiments with Qwen2.5-0.5B reveal that zero-shot fine-tuning achieves robust classification performance (86.66% accuracy) while maintaining low latency (22.2 ms per sample), significantly outperforming baseline and prompt-engineered approaches. However, results also indicate a performance degradation in one-shot modes, where increased context length challenges the model's architectural capacity. These findings demonstrate that fine-tuned SLMs provide an effective solution for direct role assignment, while highlighting critical trade-offs between dialogue complexity and classification reliability on the edge.
A Vision-Based Shared-Control Teleoperation Scheme for Controlling the Robotic Arm of a Four-Legged Robot
Aug 20, 2025In hazardous and remote environments, robotic systems perform critical tasks demanding improved safety and efficiency. Among these, quadruped robots with manipulator arms offer mobility and versatility for complex operations. However, teleoperating quadruped robots is challenging due to the lack of integrated obstacle detection and intuitive control methods for the robotic arm, increasing collision risks in confined or dynamically changing workspaces. Teleoperation via joysticks or pads can be non-intuitive and demands a high level of expertise due to its complexity, culminating in a high cognitive load on the operator. To address this challenge, a teleoperation approach that directly maps human arm movements to the robotic manipulator offers a simpler and more accessible solution. This work proposes an intuitive remote control by leveraging a vision-based pose estimation pipeline that utilizes an external camera with a machine learning-based model to detect the operator's wrist position. The system maps these wrist movements into robotic arm commands to control the robot's arm in real-time. A trajectory planner ensures safe teleoperation by detecting and preventing collisions with both obstacles and the robotic arm itself. The system was validated on the real robot, demonstrating robust performance in real-time control. This teleoperation approach provides a cost-effective solution for industrial applications where safety, precision, and ease of use are paramount, ensuring reliable and intuitive robotic control in high-risk environments.
IMA-Catcher: An IMpact-Aware Nonprehensile Catching Framework based on Combined Optimization and Learning
Jun 25, 2025Robotic catching of flying objects typically generates high impact forces that might lead to task failure and potential hardware damages. This is accentuated when the object mass to robot payload ratio increases, given the strong inertial components characterizing this task. This paper aims to address this problem by proposing an implicitly impact-aware framework that accomplishes the catching task in both pre- and post-catching phases. In the first phase, a motion planner generates optimal trajectories that minimize catching forces, while in the second, the object's energy is dissipated smoothly, minimizing bouncing. In particular, in the pre-catching phase, a real-time optimal planner is responsible for generating trajectories of the end-effector that minimize the velocity difference between the robot and the object to reduce impact forces during catching. In the post-catching phase, the robot's position, velocity, and stiffness trajectories are generated based on human demonstrations when catching a series of free-falling objects with unknown masses. A hierarchical quadratic programming-based controller is used to enforce the robot's constraints (i.e., joint and torque limits) and create a stack of tasks that minimizes the reflected mass at the end-effector as a secondary objective. The initial experiments isolate the problem along one dimension to accurately study the effects of each contribution on the metrics proposed. We show how the same task, without velocity matching, would be infeasible due to excessive joint torques resulting from the impact. The addition of reflected mass minimization is then investigated, and the catching height is increased to evaluate the method's robustness. Finally, the setup is extended to catching along multiple Cartesian axes, to prove its generalization in space.
* 25 pages, 17 figures, accepted by International Journal of Robotics Research (IJRR)
Context-aware collaborative pushing of heavy objects using skeleton-based intention prediction
May 15, 2025In physical human-robot interaction, force feedback has been the most common sensing modality to convey the human intention to the robot. It is widely used in admittance control to allow the human to direct the robot. However, it cannot be used in scenarios where direct force feedback is not available since manipulated objects are not always equipped with a force sensor. In this work, we study one such scenario: the collaborative pushing and pulling of heavy objects on frictional surfaces, a prevalent task in industrial settings. When humans do it, they communicate through verbal and non-verbal cues, where body poses, and movements often convey more than words. We propose a novel context-aware approach using Directed Graph Neural Networks to analyze spatio-temporal human posture data to predict human motion intention for non-verbal collaborative physical manipulation. Our experiments demonstrate that robot assistance significantly reduces human effort and improves task efficiency. The results indicate that incorporating posture-based context recognition, either together with or as an alternative to force sensing, enhances robot decision-making and control efficiency.
MIHRaGe: A Mixed-Reality Interface for Human-Robot Interaction via Gaze-Oriented Control
May 06, 2025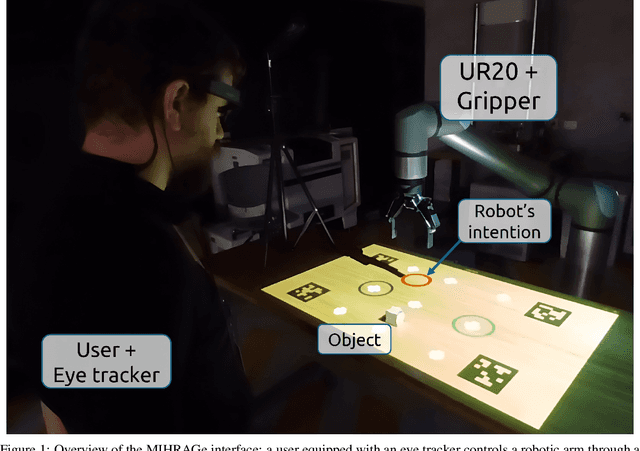
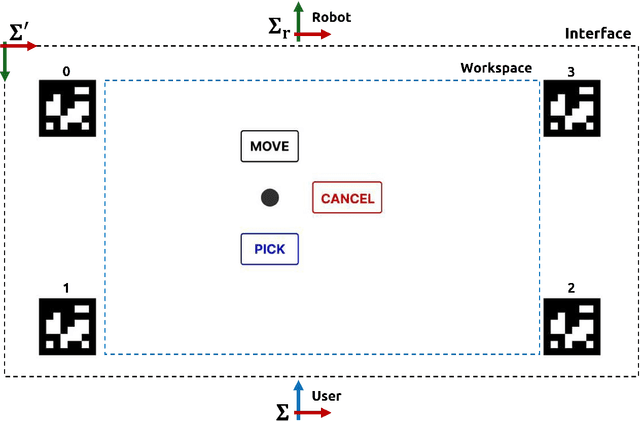
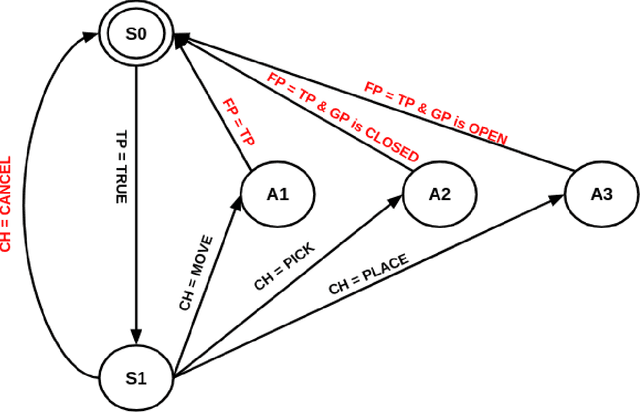
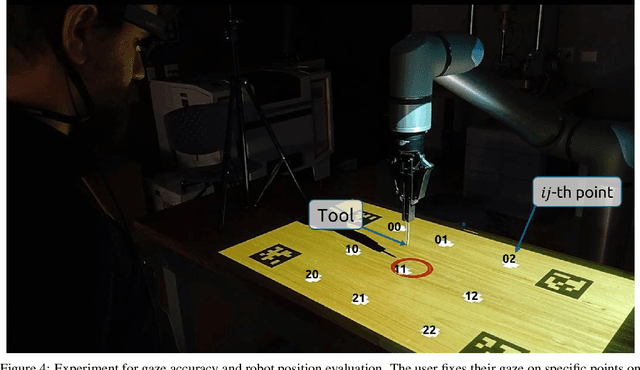
Individuals with upper limb mobility impairments often require assistive technologies to perform activities of daily living. While gaze-tracking has emerged as a promising method for robotic assistance, existing solutions lack sufficient feedback mechanisms, leading to uncertainty in user intent recognition and reduced adaptability. This paper presents the MIHRAGe interface, an integrated system that combines gaze-tracking, robotic assistance, and a mixed-reality to create an immersive environment for controlling the robot using only eye movements. The system was evaluated through an experimental protocol involving four participants, assessing gaze accuracy, robotic positioning precision, and the overall success of a pick and place task. Results showed an average gaze fixation error of 1.46 cm, with individual variations ranging from 1.28 cm to 2.14 cm. The robotic arm demonstrated an average positioning error of +-1.53 cm, with discrepancies attributed to interface resolution and calibration constraints. In a pick and place task, the system achieved a success rate of 80%, highlighting its potential for improving accessibility in human-robot interaction with visual feedback to the user.
Improving Failure Prediction in Aircraft Fastener Assembly Using Synthetic Data in Imbalanced Datasets
May 06, 2025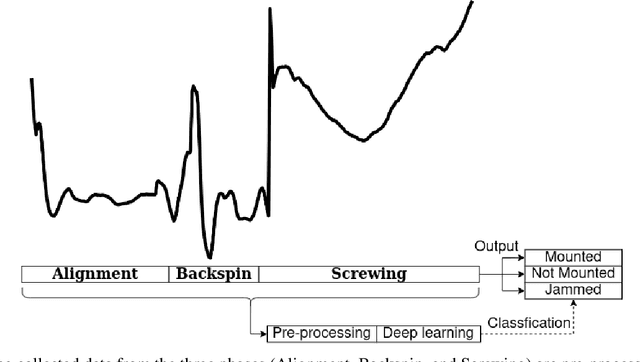

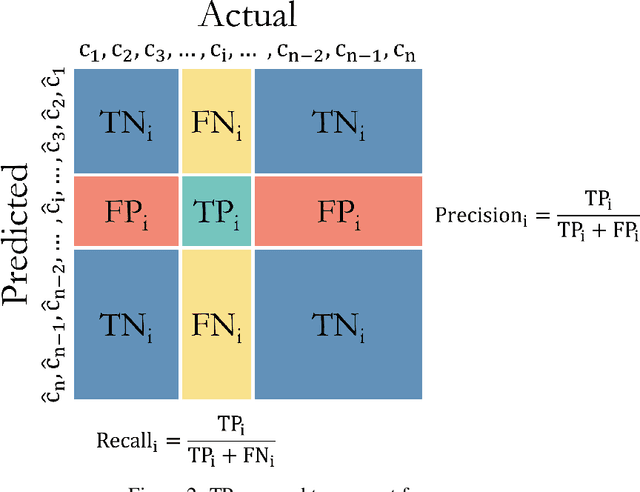
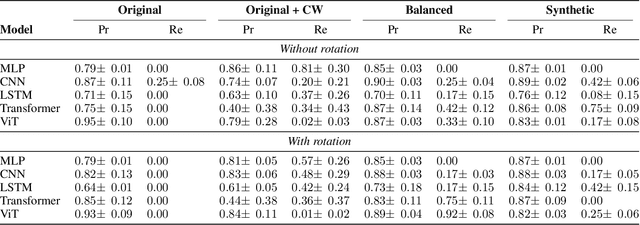
Automating aircraft manufacturing still relies heavily on human labor due to the complexity of the assembly processes and customization requirements. One key challenge is achieving precise positioning, especially for large aircraft structures, where errors can lead to substantial maintenance costs or part rejection. Existing solutions often require costly hardware or lack flexibility. Used in aircraft by the thousands, threaded fasteners, e.g., screws, bolts, and collars, are traditionally executed by fixed-base robots and usually have problems in being deployed in the mentioned manufacturing sites. This paper emphasizes the importance of error detection and classification for efficient and safe assembly of threaded fasteners, especially aeronautical collars. Safe assembly of threaded fasteners is paramount since acquiring sufficient data for training deep learning models poses challenges due to the rarity of failure cases and imbalanced datasets. The paper addresses this by proposing techniques like class weighting and data augmentation, specifically tailored for temporal series data, to improve classification performance. Furthermore, the paper introduces a novel problem-modeling approach, emphasizing metrics relevant to collar assembly rather than solely focusing on accuracy. This tailored approach enhances the models' capability to handle the challenges of threaded fastener assembly effectively.
SRL-VIC: A Variable Stiffness-Based Safe Reinforcement Learning for Contact-Rich Robotic Tasks
Jun 19, 2024



Reinforcement learning (RL) has emerged as a promising paradigm in complex and continuous robotic tasks, however, safe exploration has been one of the main challenges, especially in contact-rich manipulation tasks in unstructured environments. Focusing on this issue, we propose SRL-VIC: a model-free safe RL framework combined with a variable impedance controller (VIC). Specifically, safety critic and recovery policy networks are pre-trained where safety critic evaluates the safety of the next action using a risk value before it is executed and the recovery policy suggests a corrective action if the risk value is high. Furthermore, the policies are updated online where the task policy not only achieves the task but also modulates the stiffness parameters to keep a safe and compliant profile. A set of experiments in contact-rich maze tasks demonstrate that our framework outperforms the baselines (without the recovery mechanism and without the VIC), yielding a good trade-off between efficient task accomplishment and safety guarantee. We show our policy trained on simulation can be deployed on a physical robot without fine-tuning, achieving successful task completion with robustness and generalization. The video is available at https://youtu.be/ksWXR3vByoQ.
* Accepted by IEEE RA-L,video is available at https://youtu.be/ksWXR3vByoQ
Impact-Friendly Object Catching at Non-Zero Velocity based on Hybrid Optimization and Learning
Sep 26, 2022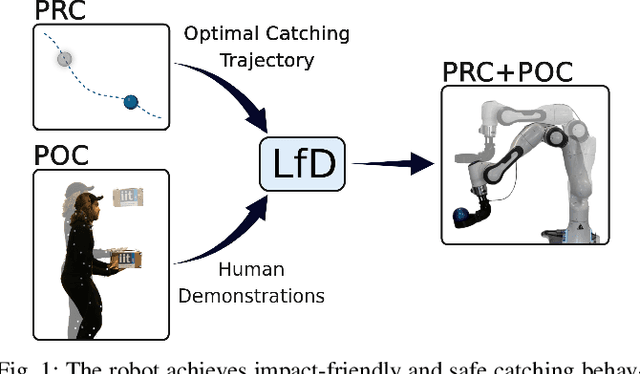
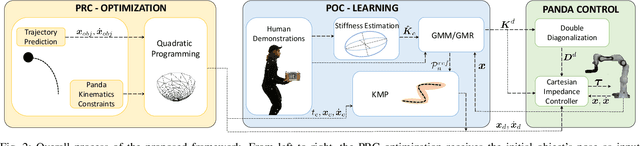
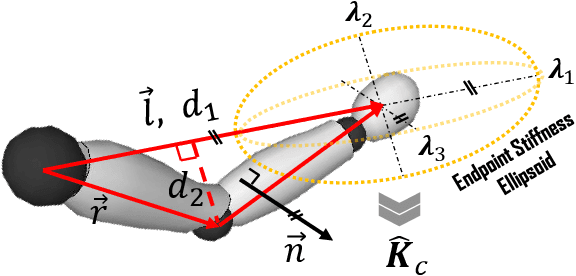

This paper proposes a hybrid optimization and learning method for impact-friendly catching objects at non-zero velocity. Through a constrained Quadratic Programming problem, the method generates optimal trajectories up to the contact point between the robot and the object to minimize their relative velocity and reduce the initial impact forces. Next, the generated trajectories are updated by Kernelized Movement Primitives which are based on human catching demonstrations to ensure a smooth transition around the catching point. In addition, the learned human variable stiffness (HVS) is sent to the robot's Cartesian impedance controller to absorb the post-impact forces and stabilize the catching position. Three experiments are conducted to compare our method with and without HVS against a fixed-position impedance controller (FP-IC). The results showed that the proposed methods outperform the FP-IC, while adding HVS yields better results for absorbing the post-impact forces.
EEG-Based Epileptic Seizure Prediction Using Temporal Multi-Channel Transformers
Sep 18, 2022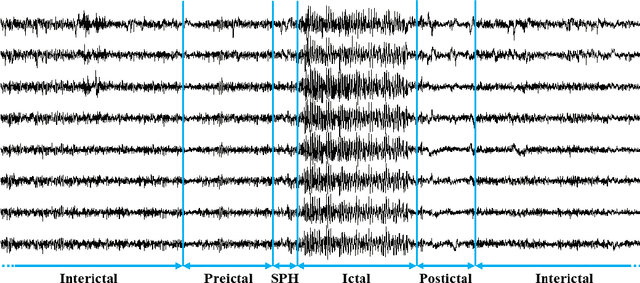

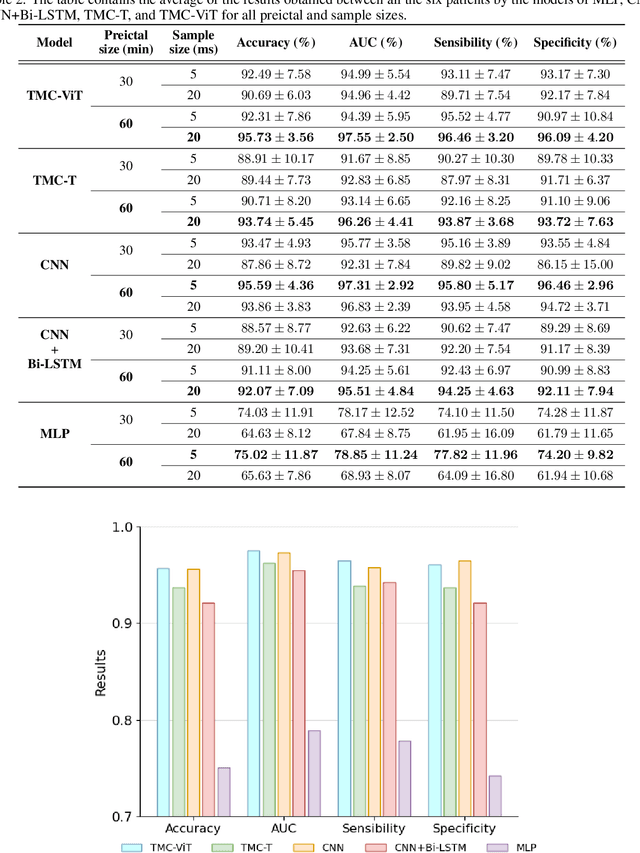

Epilepsy is one of the most common neurological diseases, characterized by transient and unprovoked events called epileptic seizures. Electroencephalogram (EEG) is an auxiliary method used to perform both the diagnosis and the monitoring of epilepsy. Given the unexpected nature of an epileptic seizure, its prediction would improve patient care, optimizing the quality of life and the treatment of epilepsy. Predicting an epileptic seizure implies the identification of two distinct states of EEG in a patient with epilepsy: the preictal and the interictal. In this paper, we developed two deep learning models called Temporal Multi-Channel Transformer (TMC-T) and Vision Transformer (TMC-ViT), adaptations of Transformer-based architectures for multi-channel temporal signals. Moreover, we accessed the impact of choosing different preictal duration, since its length is not a consensus among experts, and also evaluated how the sample size benefits each model. Our models are compared with fully connected, convolutional, and recurrent networks. The algorithms were patient-specific trained and evaluated on raw EEG signals from the CHB-MIT database. Experimental results and statistical validation demonstrated that our TMC-ViT model surpassed the CNN architecture, state-of-the-art in seizure prediction.
A hybrid model-based evolutionary optimization with passive boundaries for physical human-robot interaction
Mar 01, 2022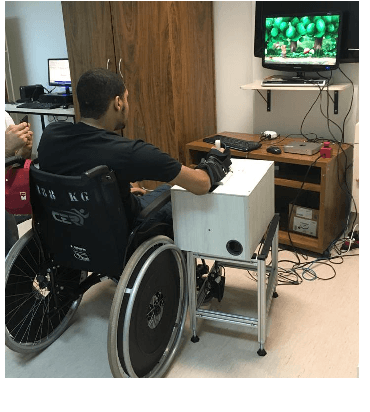
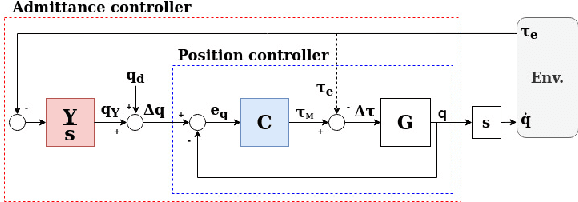
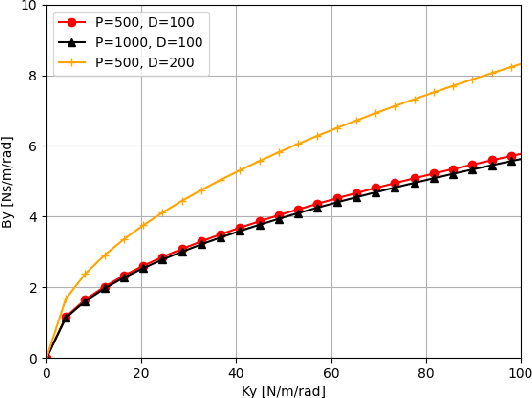
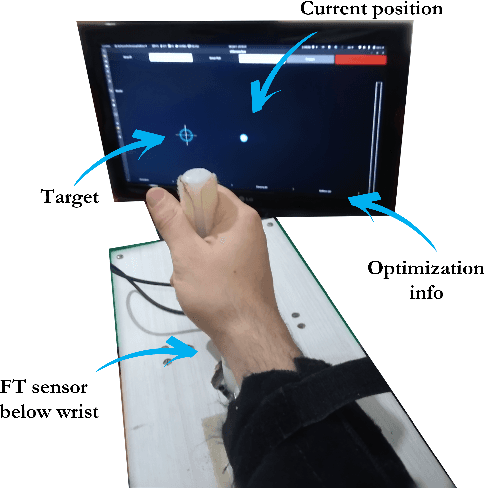
The field of physical human-robot interaction has dramatically evolved in the last decades. As a result, the robotic system's requirements have become more challenging, including personalized behavior for different tasks and users. Various machine learning techniques have been proposed to give the robot such adaptability features. This paper proposes a model-based evolutionary optimization algorithm to tune the apparent impedance of a wrist rehabilitation device. We used passivity to define boundaries for the possible controller outcomes, limiting the shared autonomy of the robot and ensuring the coupled system stability. The experiment consists of a hardware-in-the-loop optimization and a one-degree-of-freedom robot used for wrist rehabilitation. Experimental results showed that the proposed technique could generate customized passive impedance controllers for three subjects. Furthermore, when compared with a constant impedance controller, the method suggested decreased in 20\% the root mean square of interaction torques while maintaining stability during optimization.