 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvent-based Motion & Appearance Fusion for 6D Object Pose Tracking
Mar 09, 2026Object pose tracking is a fundamental and essential task for robotics to perform tasks in the home and industrial settings. The most commonly used sensors to do so are RGB-D cameras, which can hit limitations in highly dynamic environments due to motion blur and frame-rate constraints. Event cameras have remarkable features such as high temporal resolution and low latency, which make them a potentially ideal vision sensors for object pose tracking at high speed. Even so, there are still only few works on 6D pose tracking with event cameras. In this work, we take advantage of the high temporal resolution and propose a method that uses both a propagation step fused with a pose correction strategy. Specifically, we use 6D object velocity obtained from event-based optical flow for pose propagation, after which, a template-based local pose correction module is utilized for pose correction. Our learning-free method has comparable performance to the state-of-the-art algorithms, and in some cases out performs them for fast-moving objects. The results indicate the potential for using event cameras in highly-dynamic scenarios where the use of deep network approaches are limited by low update rates.
Training slow silicon neurons to control extremely fast robots with spiking reinforcement learning
Jan 29, 2026Air hockey demands split-second decisions at high puck velocities, a challenge we address with a compact network of spiking neurons running on a mixed-signal analog/digital neuromorphic processor. By co-designing hardware and learning algorithms, we train the system to achieve successful puck interactions through reinforcement learning in a remarkably small number of trials. The network leverages fixed random connectivity to capture the task's temporal structure and adopts a local e-prop learning rule in the readout layer to exploit event-driven activity for fast and efficient learning. The result is real-time learning with a setup comprising a computer and the neuromorphic chip in-the-loop, enabling practical training of spiking neural networks for robotic autonomous systems. This work bridges neuroscience-inspired hardware with real-world robotic control, showing that brain-inspired approaches can tackle fast-paced interaction tasks while supporting always-on learning in intelligent machines.
An Event-Based Opto-Tactile Skin
Jan 07, 2026This paper presents a neuromorphic, event-driven tactile sensing system for soft, large-area skin, based on the Dynamic Vision Sensors (DVS) integrated with a flexible silicone optical waveguide skin. Instead of repetitively scanning embedded photoreceivers, this design uses a stereo vision setup comprising two DVS cameras looking sideways through the skin. Such a design produces events as changes in brightness are detected, and estimates press positions on the 2D skin surface through triangulation, utilizing Density-Based Spatial Clustering of Applications with Noise (DBSCAN) to find the center of mass of contact events resulting from pressing actions. The system is evaluated over a 4620 mm2 probed area of the skin using a meander raster scan. Across 95 % of the presses visible to both cameras, the press localization achieved a Root-Mean-Squared Error (RMSE) of 4.66 mm. The results highlight the potential of this approach for wide-area flexible and responsive tactile sensors in soft robotics and interactive environments. Moreover, we examined how the system performs when the amount of event data is strongly reduced. Using stochastic down-sampling, the event stream was reduced to 1/1024 of its original size. Under this extreme reduction, the average localization error increased only slightly (from 4.66 mm to 9.33 mm), and the system still produced valid press localizations for 85 % of the trials. This reduction in pass rate is expected, as some presses no longer produce enough events to form a reliable cluster for triangulation. These results show that the sensing approach remains functional even with very sparse event data, which is promising for reducing power consumption and computational load in future implementations. The system exhibits a detection latency distribution with a characteristic width of 31 ms.
STEMNIST: Spiking Tactile Extended MNIST Neuromorphic Dataset
Jan 04, 2026Tactile sensing is essential for robotic manipulation, prosthetics and assistive technologies, yet neuromorphic tactile datasets remain limited compared to their visual counterparts. We introduce STEMNIST, a large-scale neuromorphic tactile dataset extending ST-MNIST from 10 digits to 35 alphanumeric classes (uppercase letters A--Z and digits 1--9), providing a challenging benchmark for event-based haptic recognition. The dataset comprises 7,700 samples collected from 34 participants using a custom \(16\times 16\) tactile sensor array operating at 120 Hz, encoded as 1,005,592 spike events through adaptive temporal differentiation. Following EMNIST's visual character recognition protocol, STEMNIST addresses the critical gap between simplified digit classification and real-world tactile interaction scenarios requiring alphanumeric discrimination. Baseline experiments using conventional CNNs (90.91% test accuracy) and spiking neural networks (89.16%) establish performance benchmarks. The dataset's event-based format, unrestricted spatial variability and rich temporal structure makes it suitable for testing neuromorphic hardware and bio-inspired learning algorithms. STEMNIST enables reproducible evaluation of tactile recognition systems and provides a foundation for advancing energy-efficient neuromorphic perception in robotics, biomedical engineering and human-machine interfaces. The dataset, documentation and codes are publicly available to accelerate research in neuromorphic tactile computing.
GraphEnet: Event-driven Human Pose Estimation with a Graph Neural Network
Oct 09, 2025Human Pose Estimation is a crucial module in human-machine interaction applications and, especially since the rise in deep learning technology, robust methods are available to consumers using RGB cameras and commercial GPUs. On the other hand, event-based cameras have gained popularity in the vision research community for their low latency and low energy advantages that make them ideal for applications where those resources are constrained like portable electronics and mobile robots. In this work we propose a Graph Neural Network, GraphEnet, that leverages the sparse nature of event camera output, with an intermediate line based event representation, to estimate 2D Human Pose of a single person at a high frequency. The architecture incorporates a novel offset vector learning paradigm with confidence based pooling to estimate the human pose. This is the first work that applies Graph Neural Networks to event data for Human Pose Estimation. The code is open-source at https://github.com/event-driven-robotics/GraphEnet-NeVi-ICCV2025.
6-DoF Object Tracking with Event-based Optical Flow and Frames
Aug 20, 2025Tracking the position and orientation of objects in space (i.e., in 6-DoF) in real time is a fundamental problem in robotics for environment interaction. It becomes more challenging when objects move at high-speed due to frame rate limitations in conventional cameras and motion blur. Event cameras are characterized by high temporal resolution, low latency and high dynamic range, that can potentially overcome the impacts of motion blur. Traditional RGB cameras provide rich visual information that is more suitable for the challenging task of single-shot object pose estimation. In this work, we propose using event-based optical flow combined with an RGB based global object pose estimator for 6-DoF pose tracking of objects at high-speed, exploiting the core advantages of both types of vision sensors. Specifically, we propose an event-based optical flow algorithm for object motion measurement to implement an object 6-DoF velocity tracker. By integrating the tracked object 6-DoF velocity with low frequency estimated pose from the global pose estimator, the method can track pose when objects move at high-speed. The proposed algorithm is tested and validated on both synthetic and real world data, demonstrating its effectiveness, especially in high-speed motion scenarios.
IMA-Catcher: An IMpact-Aware Nonprehensile Catching Framework based on Combined Optimization and Learning
Jun 25, 2025Robotic catching of flying objects typically generates high impact forces that might lead to task failure and potential hardware damages. This is accentuated when the object mass to robot payload ratio increases, given the strong inertial components characterizing this task. This paper aims to address this problem by proposing an implicitly impact-aware framework that accomplishes the catching task in both pre- and post-catching phases. In the first phase, a motion planner generates optimal trajectories that minimize catching forces, while in the second, the object's energy is dissipated smoothly, minimizing bouncing. In particular, in the pre-catching phase, a real-time optimal planner is responsible for generating trajectories of the end-effector that minimize the velocity difference between the robot and the object to reduce impact forces during catching. In the post-catching phase, the robot's position, velocity, and stiffness trajectories are generated based on human demonstrations when catching a series of free-falling objects with unknown masses. A hierarchical quadratic programming-based controller is used to enforce the robot's constraints (i.e., joint and torque limits) and create a stack of tasks that minimizes the reflected mass at the end-effector as a secondary objective. The initial experiments isolate the problem along one dimension to accurately study the effects of each contribution on the metrics proposed. We show how the same task, without velocity matching, would be infeasible due to excessive joint torques resulting from the impact. The addition of reflected mass minimization is then investigated, and the catching height is increased to evaluate the method's robustness. Finally, the setup is extended to catching along multiple Cartesian axes, to prove its generalization in space.
* 25 pages, 17 figures, accepted by International Journal of Robotics Research (IJRR)
Wandering around: A bioinspired approach to visual attention through object motion sensitivity
Feb 10, 2025



Active vision enables dynamic visual perception, offering an alternative to static feedforward architectures in computer vision, which rely on large datasets and high computational resources. Biological selective attention mechanisms allow agents to focus on salient Regions of Interest (ROIs), reducing computational demand while maintaining real-time responsiveness. Event-based cameras, inspired by the mammalian retina, enhance this capability by capturing asynchronous scene changes enabling efficient low-latency processing. To distinguish moving objects while the event-based camera is in motion the agent requires an object motion segmentation mechanism to accurately detect targets and center them in the visual field (fovea). Integrating event-based sensors with neuromorphic algorithms represents a paradigm shift, using Spiking Neural Networks to parallelize computation and adapt to dynamic environments. This work presents a Spiking Convolutional Neural Network bioinspired attention system for selective attention through object motion sensitivity. The system generates events via fixational eye movements using a Dynamic Vision Sensor integrated into the Speck neuromorphic hardware, mounted on a Pan-Tilt unit, to identify the ROI and saccade toward it. The system, characterized using ideal gratings and benchmarked against the Event Camera Motion Segmentation Dataset, reaches a mean IoU of 82.2% and a mean SSIM of 96% in multi-object motion segmentation. The detection of salient objects reaches 88.8% accuracy in office scenarios and 89.8% in low-light conditions on the Event-Assisted Low-Light Video Object Segmentation Dataset. A real-time demonstrator shows the system's 0.12 s response to dynamic scenes. Its learning-free design ensures robustness across perceptual scenes, making it a reliable foundation for real-time robotic applications serving as a basis for more complex architectures.
Memory Efficient Corner Detection for Event-driven Dynamic Vision Sensors
Jan 18, 2024

Event cameras offer low-latency and data compression for visual applications, through event-driven operation, that can be exploited for edge processing in tiny autonomous agents. Robust, accurate and low latency extraction of highly informative features such as corners is key for most visual processing. While several corner detection algorithms have been proposed, state-of-the-art performance is achieved by luvHarris. However, this algorithm requires a high number of memory accesses per event, making it less-than ideal for low-latency, low-energy implementation in tiny edge processors. In this paper, we propose a new event-driven corner detection implementation tailored for edge computing devices, which requires much lower memory access than luvHarris while also improving accuracy. Our method trades computation for memory access, which is more expensive for large memories. For a DAVIS346 camera, our method requires ~3.8X less memory, ~36.6X less memory accesses with only ~2.3X more computes.
WaLiN-GUI: a graphical and auditory tool for neuron-based encoding
Oct 25, 2023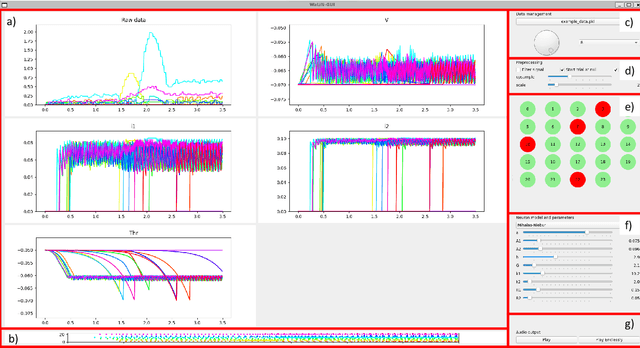
Neuromorphic computing relies on spike-based, energy-efficient communication, inherently implying the need for conversion between real-valued (sensory) data and binary, sparse spiking representation. This is usually accomplished using the real valued data as current input to a spiking neuron model, and tuning the neuron's parameters to match a desired, often biologically inspired behaviour. We developed a tool, the WaLiN-GUI, that supports the investigation of neuron models and parameter combinations to identify suitable configurations for neuron-based encoding of sample-based data into spike trains. Due to the generalized LIF model implemented by default, next to the LIF and Izhikevich neuron models, many spiking behaviors can be investigated out of the box, thus offering the possibility of tuning biologically plausible responses to the input data. The GUI is provided open source and with documentation, being easy to extend with further neuron models and personalize with data analysis functions.