 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA scalable event-driven spatiotemporal feature extraction circuit
Jan 17, 2025Event-driven sensors, which produce data only when there is a change in the input signal, are increasingly used in applications that require low-latency and low-power real-time sensing, such as robotics and edge devices. To fully achieve the latency and power advantages on offer however, similarly event-driven data processing methods are required. A promising solution is the TDE: an event-based processing element which encodes the time difference between events on different channels into an output event stream. In this work we introduce a novel TDE implementation on CMOS. The circuit is robust to device mismatch and allows the linear integration of input events. This is crucial for enabling a high-density implementation of many TDEs on the same die, and for realising real-time parallel processing of the high-event-rate data produced by event-driven sensors.
Constraints on the design of neuromorphic circuits set by the properties of neural population codes
Dec 08, 2022In the brain, information is encoded, transmitted and used to inform behaviour at the level of timing of action potentials distributed over population of neurons. To implement neural-like systems in silico, to emulate neural function, and to interface successfully with the brain, neuromorphic circuits need to encode information in a way compatible to that used by populations of neuron in the brain. To facilitate the cross-talk between neuromorphic engineering and neuroscience, in this Review we first critically examine and summarize emerging recent findings about how population of neurons encode and transmit information. We examine the effects on encoding and readout of information for different features of neural population activity, namely the sparseness of neural representations, the heterogeneity of neural properties, the correlations among neurons, and the time scales (from short to long) at which neurons encode information and maintain it consistently over time. Finally, we critically elaborate on how these facts constrain the design of information coding in neuromorphic circuits. We focus primarily on the implications for designing neuromorphic circuits that communicate with the brain, as in this case it is essential that artificial and biological neurons use compatible neural codes. However, we also discuss implications for the design of neuromorphic systems for implementation or emulation of neural computation.
Finding the Gap: Neuromorphic Motion Vision in Cluttered Environments
Feb 16, 2021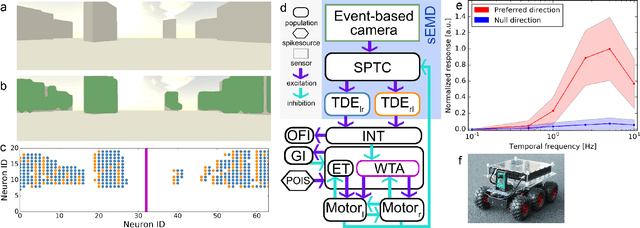
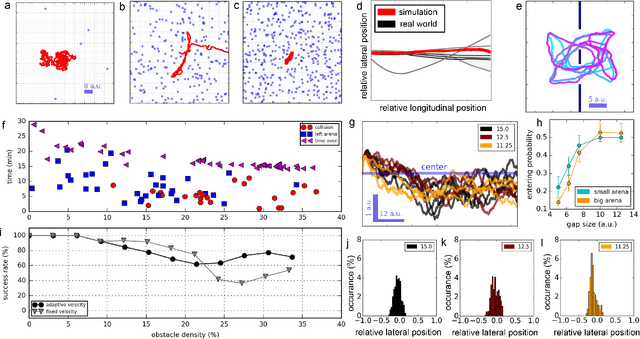
Many animals meander in environments and avoid collisions. How the underlying neuronal machinery can yield robust behaviour in a variety of environments remains unclear. In the fly brain, motion-sensitive neurons indicate the presence of nearby objects and directional cues are integrated within an area known as the central complex. Such neuronal machinery, in contrast with the traditional stream-based approach to signal processing, uses an event-based approach, with events occurring when changes are sensed by the animal. Contrary to von Neumann computing architectures, event-based neuromorphic hardware is designed to process information in an asynchronous and distributed manner. Inspired by the fly brain, we model, for the first time, a neuromorphic closed-loop system mimicking essential behaviours observed in flying insects, such as meandering in clutter and gap crossing, which are highly relevant for autonomous vehicles. We implemented our system both in software and on neuromorphic hardware. While moving through an environment, our agent perceives changes in its surroundings and uses this information for collision avoidance. The agent's manoeuvres result from a closed action-perception loop implementing probabilistic decision-making processes. This loop-closure is thought to have driven the development of neural circuitry in biological agents since the Cambrian explosion. In the fundamental quest to understand neural computation in artificial agents, we come closer to understanding and modelling biological intelligence by closing the loop also in neuromorphic systems. As a closed-loop system, our system deepens our understanding of processing in neural networks and computations in biological and artificial systems. With these investigations, we aim to set the foundations for neuromorphic intelligence in the future, moving towards leveraging the full potential of neuromorphic systems.