 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHybrid guided variational autoencoder for visual place recognition
Jan 14, 2026Autonomous agents such as cars, robots and drones need to precisely localize themselves in diverse environments, including in GPS-denied indoor environments. One approach for precise localization is visual place recognition (VPR), which estimates the place of an image based on previously seen places. State-of-the-art VPR models require high amounts of memory, making them unwieldy for mobile deployment, while more compact models lack robustness and generalization capabilities. This work overcomes these limitations for robotics using a combination of event-based vision sensors and an event-based novel guided variational autoencoder (VAE). The encoder part of our model is based on a spiking neural network model which is compatible with power-efficient low latency neuromorphic hardware. The VAE successfully disentangles the visual features of 16 distinct places in our new indoor VPR dataset with a classification performance comparable to other state-of-the-art approaches while, showing robust performance also under various illumination conditions. When tested with novel visual inputs from unknown scenes, our model can distinguish between these places, which demonstrates a high generalization capability by learning the essential features of location. Our compact and robust guided VAE with generalization capabilities poses a promising model for visual place recognition that can significantly enhance mobile robot navigation in known and unknown indoor environments.
Finding the Gap: Neuromorphic Motion Vision in Cluttered Environments
Feb 16, 2021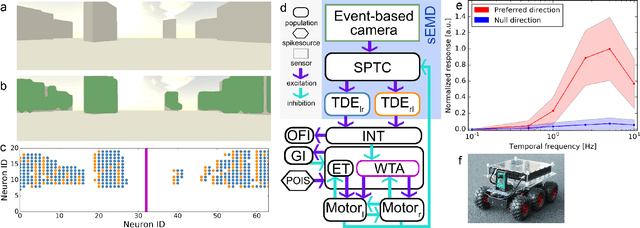
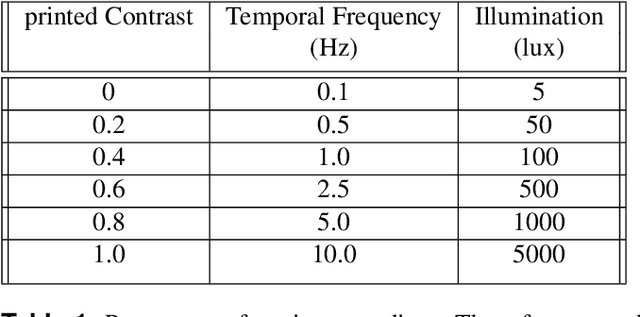
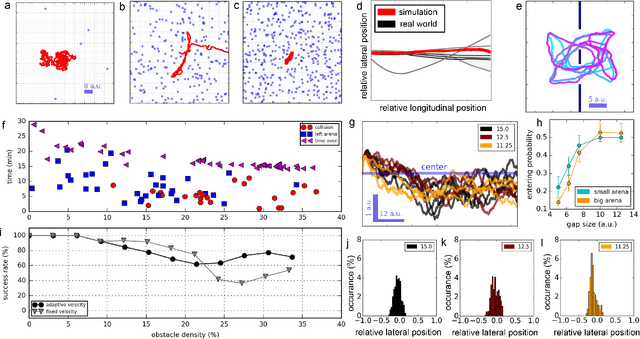
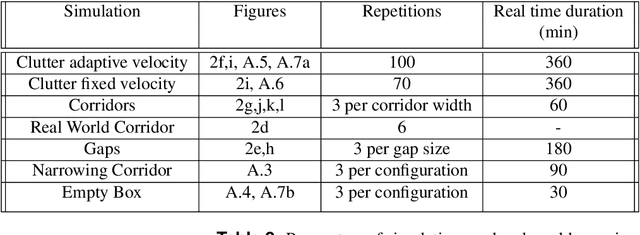
Many animals meander in environments and avoid collisions. How the underlying neuronal machinery can yield robust behaviour in a variety of environments remains unclear. In the fly brain, motion-sensitive neurons indicate the presence of nearby objects and directional cues are integrated within an area known as the central complex. Such neuronal machinery, in contrast with the traditional stream-based approach to signal processing, uses an event-based approach, with events occurring when changes are sensed by the animal. Contrary to von Neumann computing architectures, event-based neuromorphic hardware is designed to process information in an asynchronous and distributed manner. Inspired by the fly brain, we model, for the first time, a neuromorphic closed-loop system mimicking essential behaviours observed in flying insects, such as meandering in clutter and gap crossing, which are highly relevant for autonomous vehicles. We implemented our system both in software and on neuromorphic hardware. While moving through an environment, our agent perceives changes in its surroundings and uses this information for collision avoidance. The agent's manoeuvres result from a closed action-perception loop implementing probabilistic decision-making processes. This loop-closure is thought to have driven the development of neural circuitry in biological agents since the Cambrian explosion. In the fundamental quest to understand neural computation in artificial agents, we come closer to understanding and modelling biological intelligence by closing the loop also in neuromorphic systems. As a closed-loop system, our system deepens our understanding of processing in neural networks and computations in biological and artificial systems. With these investigations, we aim to set the foundations for neuromorphic intelligence in the future, moving towards leveraging the full potential of neuromorphic systems.