 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvent-based Motion & Appearance Fusion for 6D Object Pose Tracking
Mar 09, 2026Object pose tracking is a fundamental and essential task for robotics to perform tasks in the home and industrial settings. The most commonly used sensors to do so are RGB-D cameras, which can hit limitations in highly dynamic environments due to motion blur and frame-rate constraints. Event cameras have remarkable features such as high temporal resolution and low latency, which make them a potentially ideal vision sensors for object pose tracking at high speed. Even so, there are still only few works on 6D pose tracking with event cameras. In this work, we take advantage of the high temporal resolution and propose a method that uses both a propagation step fused with a pose correction strategy. Specifically, we use 6D object velocity obtained from event-based optical flow for pose propagation, after which, a template-based local pose correction module is utilized for pose correction. Our learning-free method has comparable performance to the state-of-the-art algorithms, and in some cases out performs them for fast-moving objects. The results indicate the potential for using event cameras in highly-dynamic scenarios where the use of deep network approaches are limited by low update rates.
GraphEnet: Event-driven Human Pose Estimation with a Graph Neural Network
Oct 09, 2025Human Pose Estimation is a crucial module in human-machine interaction applications and, especially since the rise in deep learning technology, robust methods are available to consumers using RGB cameras and commercial GPUs. On the other hand, event-based cameras have gained popularity in the vision research community for their low latency and low energy advantages that make them ideal for applications where those resources are constrained like portable electronics and mobile robots. In this work we propose a Graph Neural Network, GraphEnet, that leverages the sparse nature of event camera output, with an intermediate line based event representation, to estimate 2D Human Pose of a single person at a high frequency. The architecture incorporates a novel offset vector learning paradigm with confidence based pooling to estimate the human pose. This is the first work that applies Graph Neural Networks to event data for Human Pose Estimation. The code is open-source at https://github.com/event-driven-robotics/GraphEnet-NeVi-ICCV2025.
6-DoF Object Tracking with Event-based Optical Flow and Frames
Aug 20, 2025Tracking the position and orientation of objects in space (i.e., in 6-DoF) in real time is a fundamental problem in robotics for environment interaction. It becomes more challenging when objects move at high-speed due to frame rate limitations in conventional cameras and motion blur. Event cameras are characterized by high temporal resolution, low latency and high dynamic range, that can potentially overcome the impacts of motion blur. Traditional RGB cameras provide rich visual information that is more suitable for the challenging task of single-shot object pose estimation. In this work, we propose using event-based optical flow combined with an RGB based global object pose estimator for 6-DoF pose tracking of objects at high-speed, exploiting the core advantages of both types of vision sensors. Specifically, we propose an event-based optical flow algorithm for object motion measurement to implement an object 6-DoF velocity tracker. By integrating the tracked object 6-DoF velocity with low frequency estimated pose from the global pose estimator, the method can track pose when objects move at high-speed. The proposed algorithm is tested and validated on both synthetic and real world data, demonstrating its effectiveness, especially in high-speed motion scenarios.
IMA-Catcher: An IMpact-Aware Nonprehensile Catching Framework based on Combined Optimization and Learning
Jun 25, 2025Robotic catching of flying objects typically generates high impact forces that might lead to task failure and potential hardware damages. This is accentuated when the object mass to robot payload ratio increases, given the strong inertial components characterizing this task. This paper aims to address this problem by proposing an implicitly impact-aware framework that accomplishes the catching task in both pre- and post-catching phases. In the first phase, a motion planner generates optimal trajectories that minimize catching forces, while in the second, the object's energy is dissipated smoothly, minimizing bouncing. In particular, in the pre-catching phase, a real-time optimal planner is responsible for generating trajectories of the end-effector that minimize the velocity difference between the robot and the object to reduce impact forces during catching. In the post-catching phase, the robot's position, velocity, and stiffness trajectories are generated based on human demonstrations when catching a series of free-falling objects with unknown masses. A hierarchical quadratic programming-based controller is used to enforce the robot's constraints (i.e., joint and torque limits) and create a stack of tasks that minimizes the reflected mass at the end-effector as a secondary objective. The initial experiments isolate the problem along one dimension to accurately study the effects of each contribution on the metrics proposed. We show how the same task, without velocity matching, would be infeasible due to excessive joint torques resulting from the impact. The addition of reflected mass minimization is then investigated, and the catching height is increased to evaluate the method's robustness. Finally, the setup is extended to catching along multiple Cartesian axes, to prove its generalization in space.
* 25 pages, 17 figures, accepted by International Journal of Robotics Research (IJRR)
An Event-Based Perception Pipeline for a Table Tennis Robot
Feb 02, 2025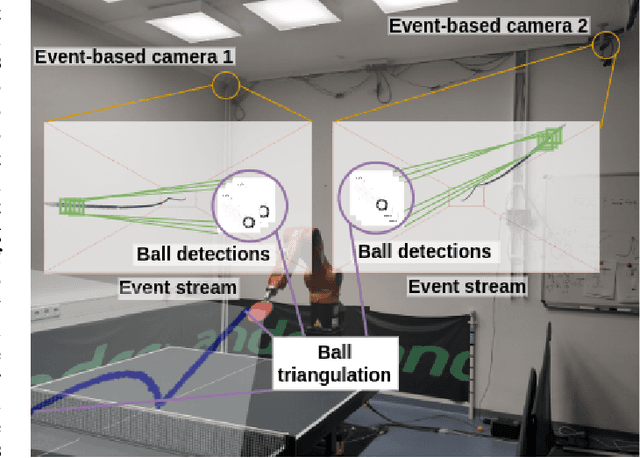
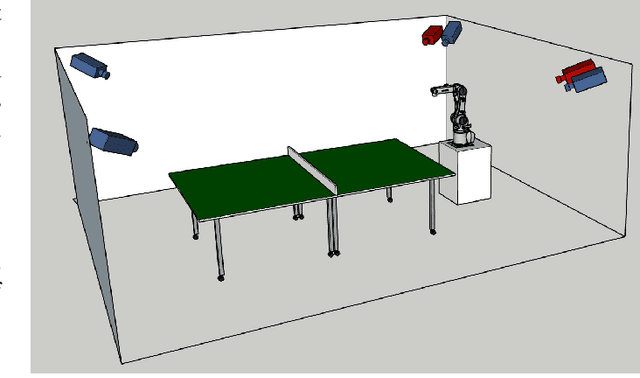
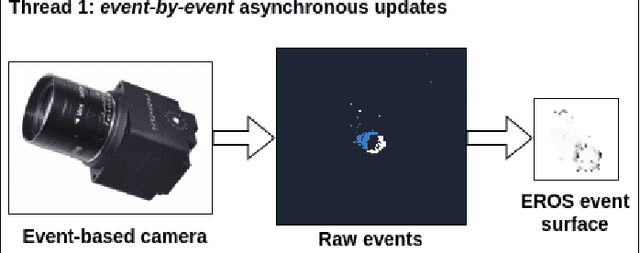
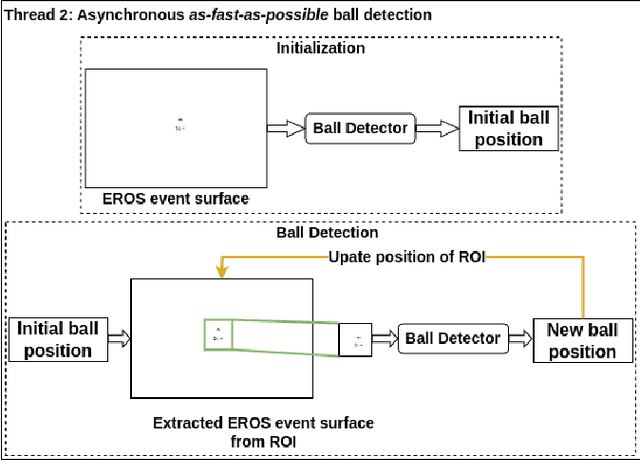
Table tennis robots gained traction over the last years and have become a popular research challenge for control and perception algorithms. Fast and accurate ball detection is crucial for enabling a robotic arm to rally the ball back successfully. So far, most table tennis robots use conventional, frame-based cameras for the perception pipeline. However, frame-based cameras suffer from motion blur if the frame rate is not high enough for fast-moving objects. Event-based cameras, on the other hand, do not have this drawback since pixels report changes in intensity asynchronously and independently, leading to an event stream with a temporal resolution on the order of us. To the best of our knowledge, we present the first real-time perception pipeline for a table tennis robot that uses only event-based cameras. We show that compared to a frame-based pipeline, event-based perception pipelines have an update rate which is an order of magnitude higher. This is beneficial for the estimation and prediction of the ball's position, velocity, and spin, resulting in lower mean errors and uncertainties. These improvements are an advantage for the robot control, which has to be fast, given the short time a table tennis ball is flying until the robot has to hit back.
Memory Efficient Corner Detection for Event-driven Dynamic Vision Sensors
Jan 18, 2024

Event cameras offer low-latency and data compression for visual applications, through event-driven operation, that can be exploited for edge processing in tiny autonomous agents. Robust, accurate and low latency extraction of highly informative features such as corners is key for most visual processing. While several corner detection algorithms have been proposed, state-of-the-art performance is achieved by luvHarris. However, this algorithm requires a high number of memory accesses per event, making it less-than ideal for low-latency, low-energy implementation in tiny edge processors. In this paper, we propose a new event-driven corner detection implementation tailored for edge computing devices, which requires much lower memory access than luvHarris while also improving accuracy. Our method trades computation for memory access, which is more expensive for large memories. For a DAVIS346 camera, our method requires ~3.8X less memory, ~36.6X less memory accesses with only ~2.3X more computes.
Fast Trajectory End-Point Prediction with Event Cameras for Reactive Robot Control
Feb 27, 2023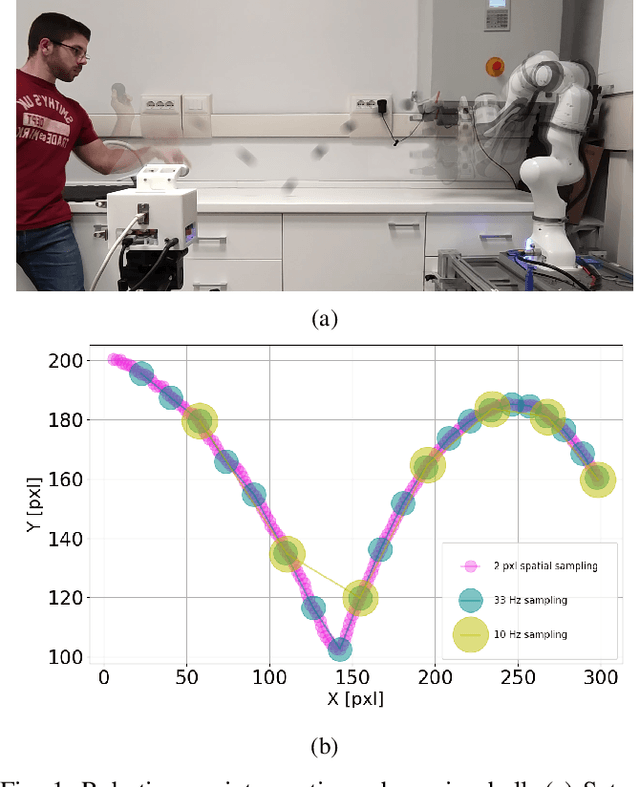
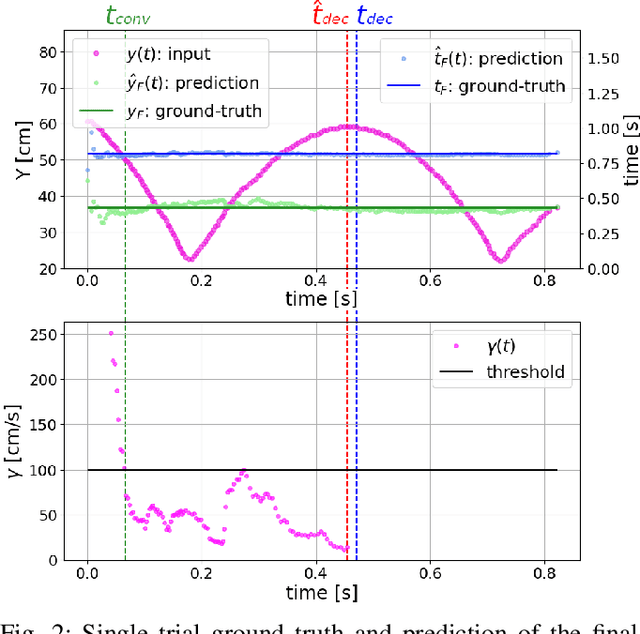
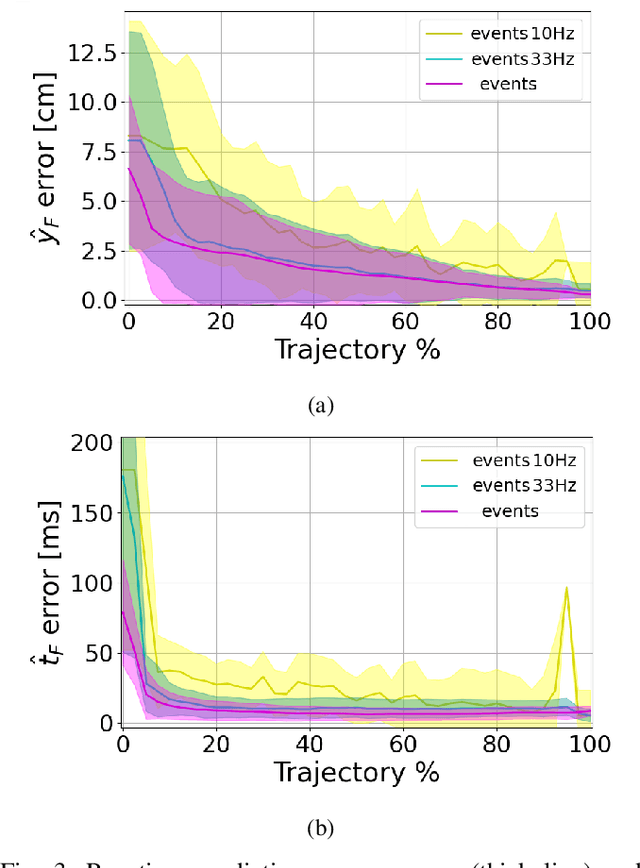
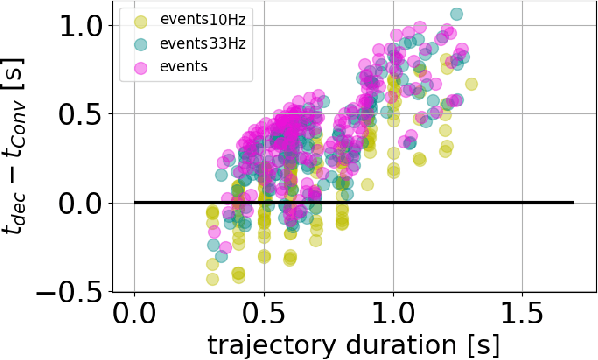
Prediction skills can be crucial for the success of tasks where robots have limited time to act or joints actuation power. In such a scenario, a vision system with a fixed, possibly too low, sampling rate could lead to the loss of informative points, slowing down prediction convergence and reducing the accuracy. In this paper, we propose to exploit the low latency, motion-driven sampling, and data compression properties of event cameras to overcome these issues. As a use-case, we use a Panda robotic arm to intercept a ball bouncing on a table. To predict the interception point, we adopt a Stateful LSTM network, a specific LSTM variant without fixed input length, which perfectly suits the event-driven paradigm and the problem at hand, where the length of the trajectory is not defined. We train the network in simulation to speed up the dataset acquisition and then fine-tune the models on real trajectories. Experimental results demonstrate how using a dense spatial sampling (i.e. event cameras) significantly increases the number of intercepted trajectories as compared to a fixed temporal sampling (i.e. frame-based cameras).
PUCK: Parallel Surface and Convolution-kernel Tracking for Event-Based Cameras
May 16, 2022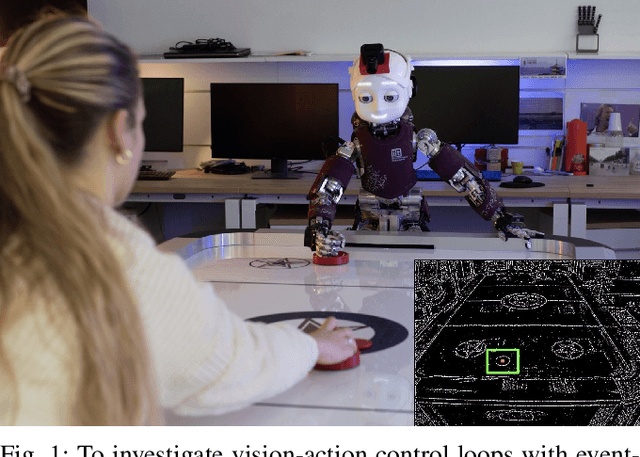
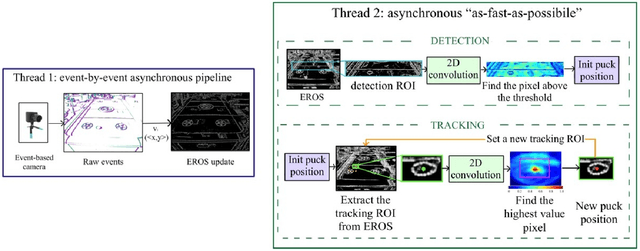
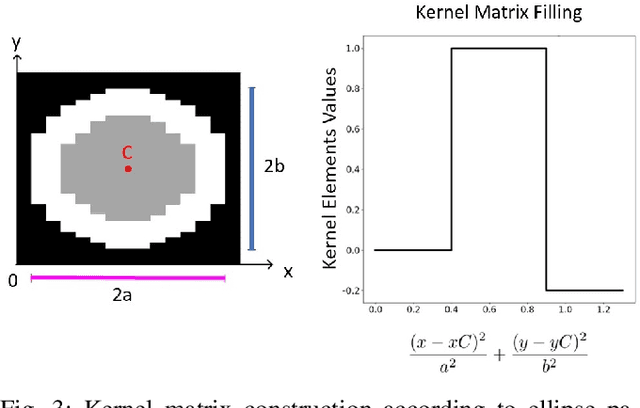
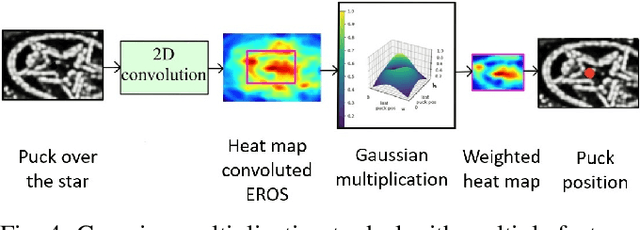
Low latency and accuracy are fundamental requirements when vision is integrated in robots for high-speed interaction with targets, since they affect system reliability and stability. In such a scenario, the choice of the sensor and algorithms is important for the entire control loop. The technology of event-cameras can guarantee fast visual sensing in dynamic environments, but requires a tracking algorithm that can keep up with the high data rate induced by the robot ego-motion while maintaining accuracy and robustness to distractors. In this paper, we introduce a novel tracking method that leverages the Exponential Reduced Ordinal Surface (EROS) data representation to decouple event-by-event processing and tracking computation. The latter is performed using convolution kernels to detect and follow a circular target moving on a plane. To benchmark state-of-the-art event-based tracking, we propose the task of tracking the air hockey puck sliding on a surface, with the future aim of controlling the iCub robot to reach the target precisely and on time. Experimental results demonstrate that our algorithm achieves the best compromise between low latency and tracking accuracy both when the robot is still and when moving.
luvHarris: A Practical Corner Detector for Event-cameras
May 24, 2021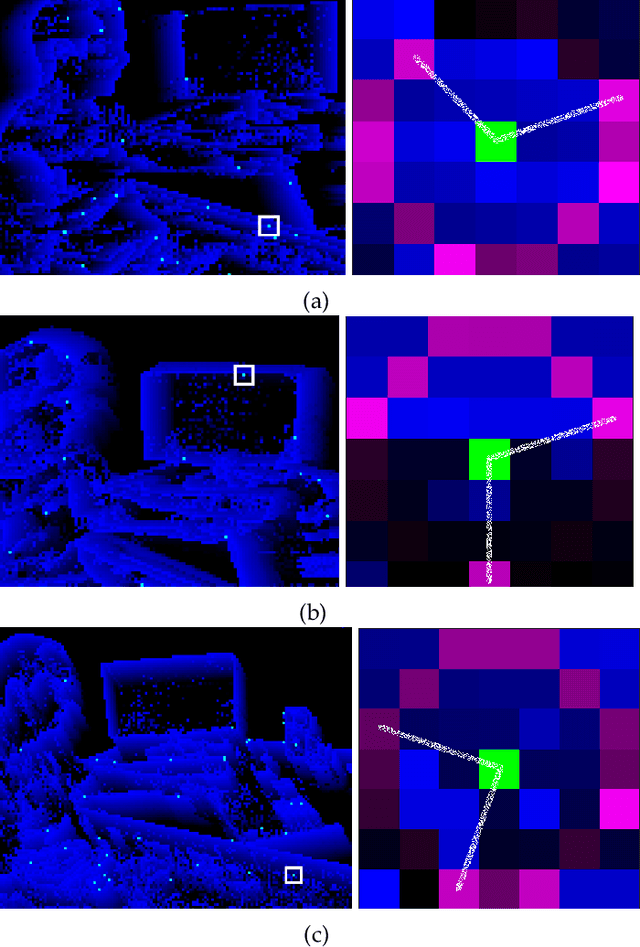
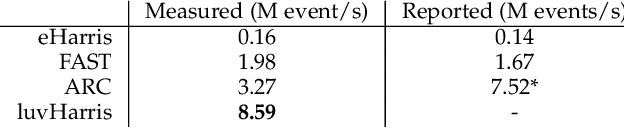
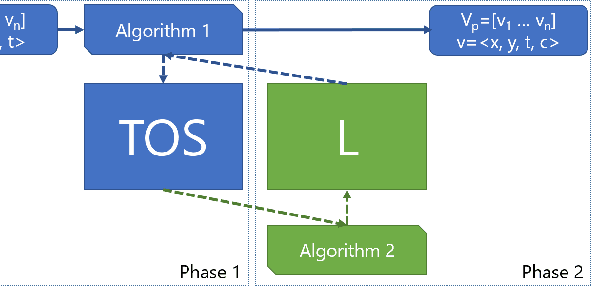
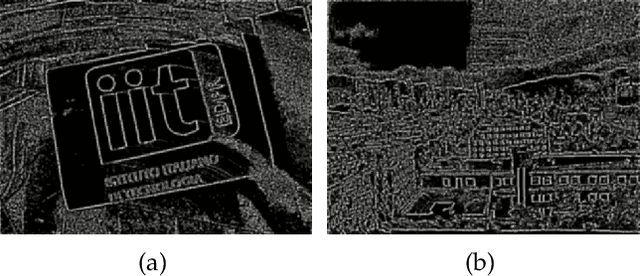
There have been a number of corner detection methods proposed for event cameras in the last years, since event-driven computer vision has become more accessible. Current state-of-the-art have either unsatisfactory accuracy or real-time performance when considered for practical use; random motion using a live camera in an unconstrained environment. In this paper, we present yet another method to perform corner detection, dubbed look-up event-Harris (luvHarris), that employs the Harris algorithm for high accuracy but manages an improved event throughput. Our method has two major contributions, 1. a novel "threshold ordinal event-surface" that removes certain tuning parameters and is well suited for Harris operations, and 2. an implementation of the Harris algorithm such that the computational load per-event is minimised and computational heavy convolutions are performed only 'as-fast-as-possible', i.e. only as computational resources are available. The result is a practical, real-time, and robust corner detector that runs more than $2.6\times$ the speed of current state-of-the-art; a necessity when using high-resolution event-camera in real-time. We explain the considerations taken for the approach, compare the algorithm to current state-of-the-art in terms of computational performance and detection accuracy, and discuss the validity of the proposed approach for event cameras.
Exploiting Event Cameras for Spatio-Temporal Prediction of Fast-Changing Trajectories
Jan 15, 2020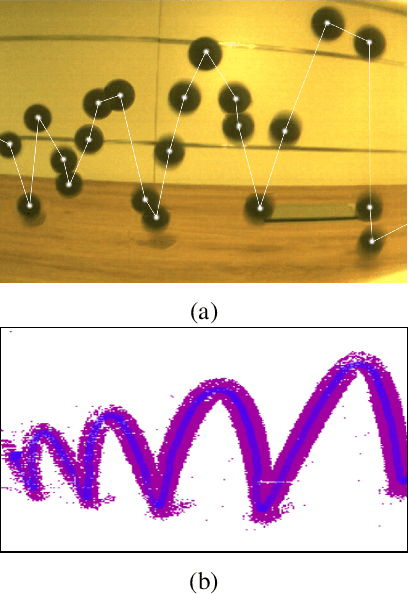
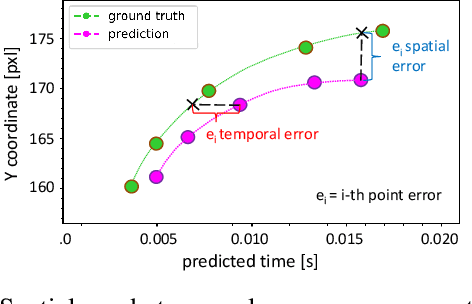
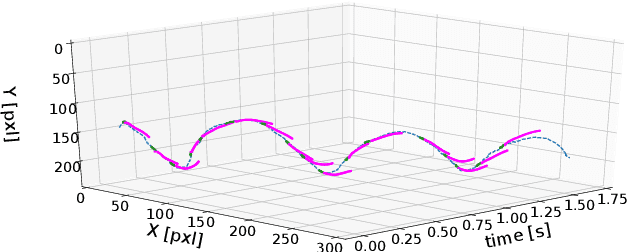
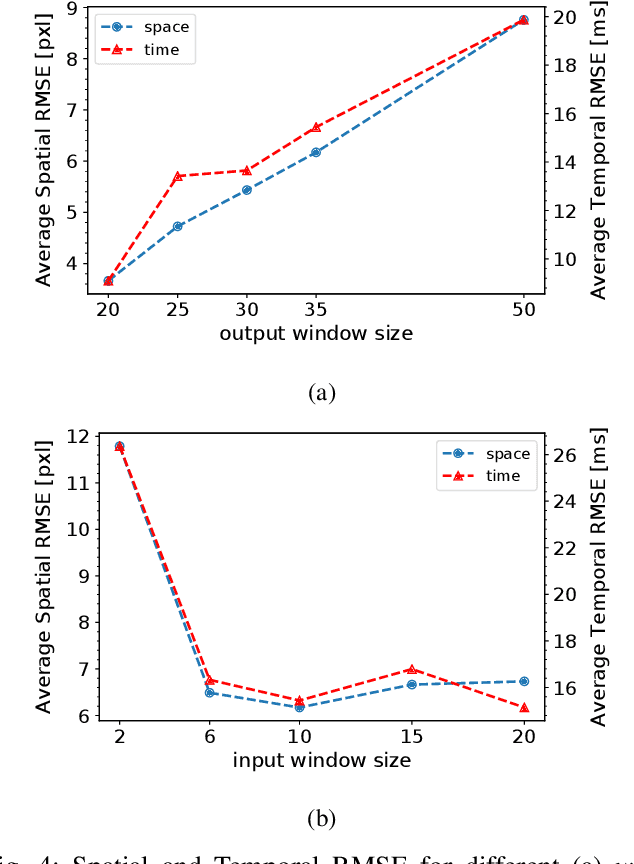
This paper investigates trajectory prediction for robotics, to improve the interaction of robots with moving targets, such as catching a bouncing ball. Unexpected, highly-non-linear trajectories cannot easily be predicted with regression-based fitting procedures, therefore we apply state of the art machine learning, specifically based on Long-Short Term Memory (LSTM) architectures. In addition, fast moving targets are better sensed using event cameras, which produce an asynchronous output triggered by spatial change, rather than at fixed temporal intervals as with traditional cameras. We investigate how LSTM models can be adapted for event camera data, and in particular look at the benefit of using asynchronously sampled data.