 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeATIS + SpiNNaker: a Fully Event-based Visual Tracking Demonstration
Dec 03, 2019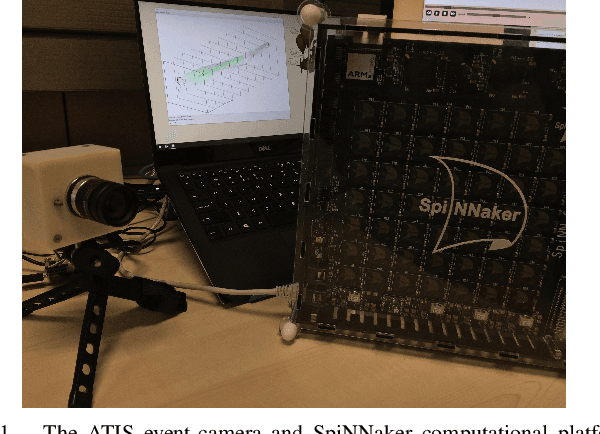
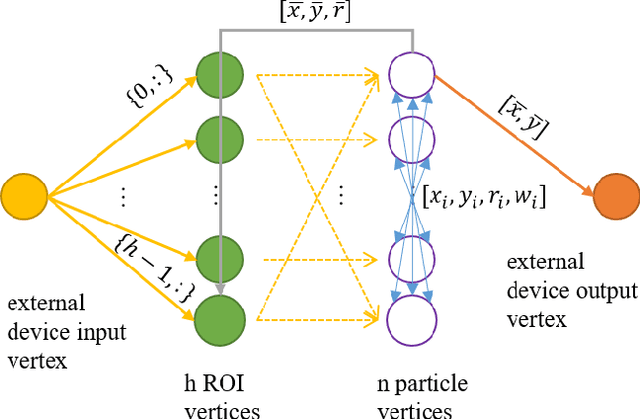
The Asynchronous Time-based Image Sensor (ATIS) and the Spiking Neural Network Architecture (SpiNNaker) are both neuromorphic technologies that "unconventionally" use binary spikes to represent information. The ATIS produces spikes to represent the change in light falling on the sensor, and the SpiNNaker is a massively parallel computing platform that asynchronously sends spikes between cores for processing. In this demonstration we show these two hardware used together to perform a visual tracking task. We aim to show the hardware and software architecture that integrates the ATIS and SpiNNaker together in a robot middle-ware that makes processing agnostic to the platform (CPU or SpiNNaker). We also aim to describe the algorithm, why it is suitable for the "unconventional" sensor and processing platform including the advantages as well as challenges faced.
SpiNNTools: The Execution Engine for the SpiNNaker Platform
Oct 16, 2018
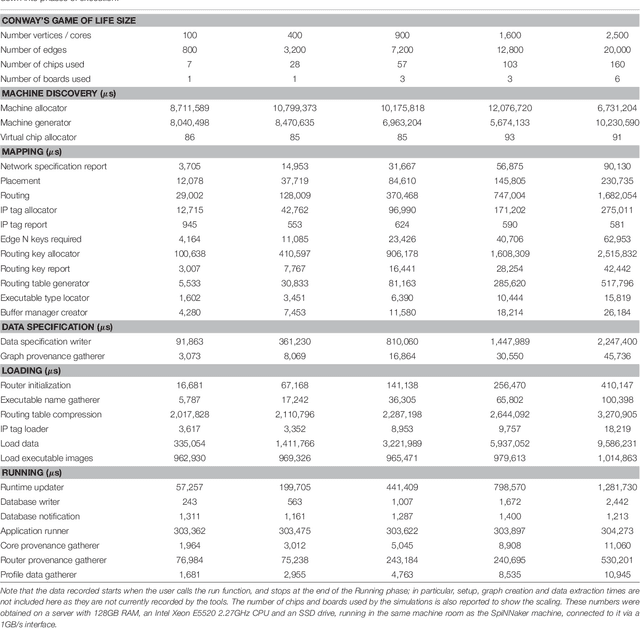
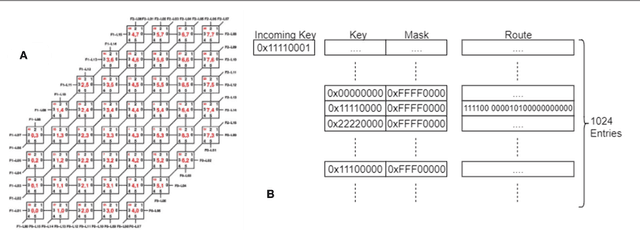
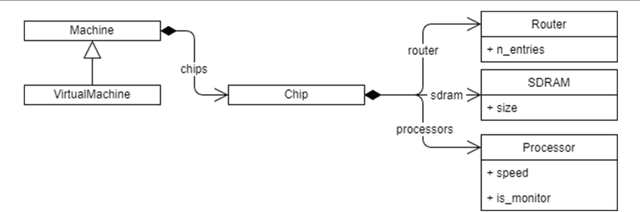
Distributed systems are becoming more common place, as computers typically contain multiple computation processors. The SpiNNaker architecture is such a distributed architecture, containing millions of cores connected with a unique communication network, making it one of the largest neuromorphic computing platforms in the world. Utilising these processors efficiently usually requires expert knowledge of the architecture to generate executable code. This work introduces a set of tools (SpiNNTools) that can map computational work described as a graph in to executable code that runs on this novel machine. The SpiNNaker architecture is highly scalable which in turn produces unique challenges in loading data, executing the mapped problem and the retrieval of data. In this paper we describe these challenges in detail and the solutions implemented.