 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSupervised learning of spatial features with STDP and homeostasis using Spiking Neural Networks on SpiNNaker
Dec 05, 2023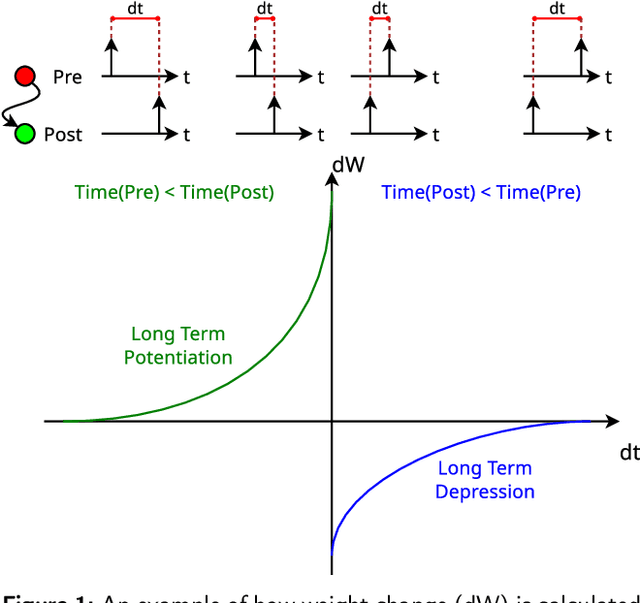

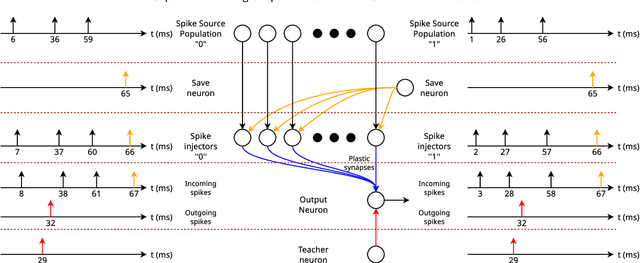
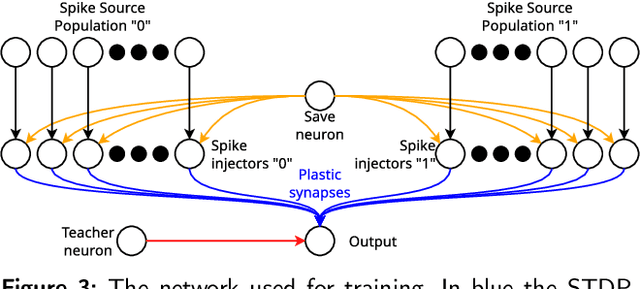
Artificial Neural Networks (ANN) have gained large popularity thanks to their ability to learn using the well-known backpropagation algorithm. On the other hand, Spiking Neural Networks (SNNs), despite having wider abilities than ANNs, have always presented a challenge in the training phase. This paper shows a new method to perform supervised learning on SNNs, using Spike Timing Dependent Plasticity (STDP) and homeostasis, aiming at training the network to identify spatial patterns. The method is tested using the SpiNNaker digital architecture. A SNN is trained to recognise one or multiple patterns and performance metrics are extracted to measure the performance of the network. Some considerations are drawn from the results showing that, in the case of a single trained pattern, the network behaves as the ideal detector, with 100% accuracy in detecting the trained pattern. However, as the number of trained patterns on a single network increases, the accuracy of the identification is linked to the similarities between these patterns. This method of training an SNN to detect spatial patterns may be applied on pattern recognition in static images or traffic analysis in computer networks, where each network packet represents a spatial pattern. It will be stipulated that the homeostatic factor may enable the network to detect patterns with some degree of similarities, rather than only perfectly matching patterns.
SpiNNTools: The Execution Engine for the SpiNNaker Platform
Oct 16, 2018
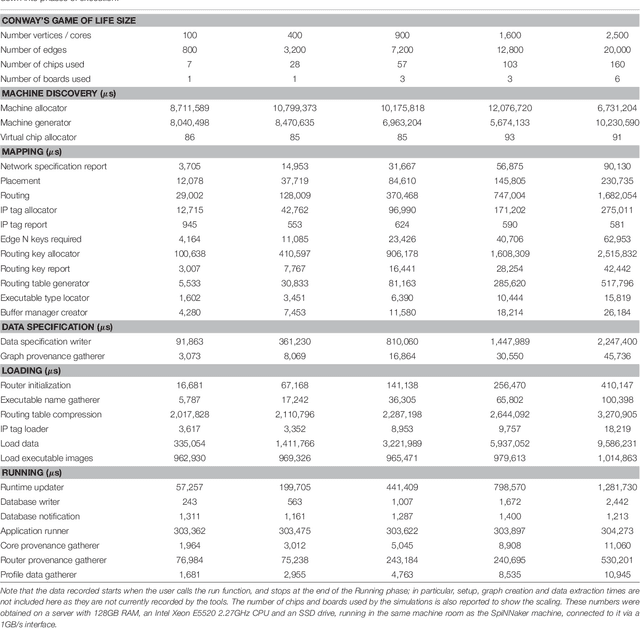
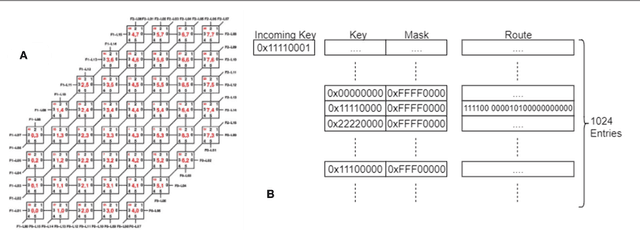
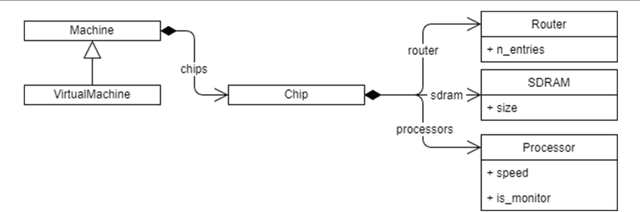
Distributed systems are becoming more common place, as computers typically contain multiple computation processors. The SpiNNaker architecture is such a distributed architecture, containing millions of cores connected with a unique communication network, making it one of the largest neuromorphic computing platforms in the world. Utilising these processors efficiently usually requires expert knowledge of the architecture to generate executable code. This work introduces a set of tools (SpiNNTools) that can map computational work described as a graph in to executable code that runs on this novel machine. The SpiNNaker architecture is highly scalable which in turn produces unique challenges in loading data, executing the mapped problem and the retrieval of data. In this paper we describe these challenges in detail and the solutions implemented.