 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMinimal Embodiment Enables Efficient Learning of Number Concepts in Robot
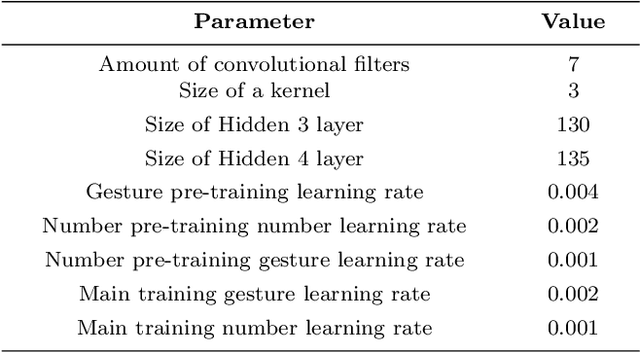
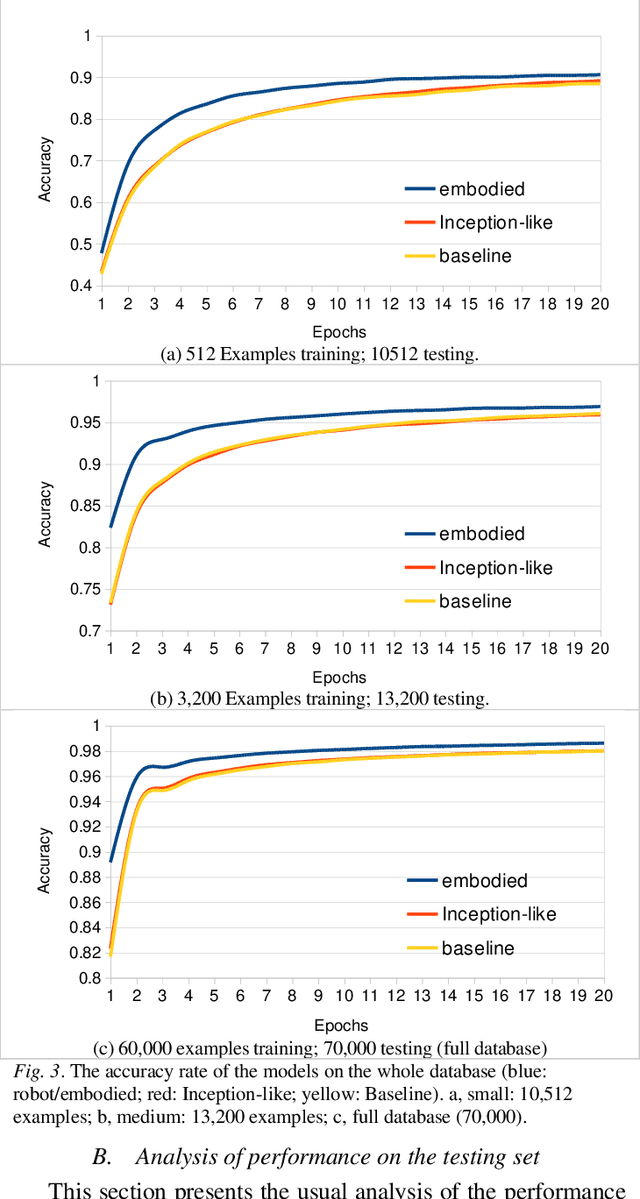
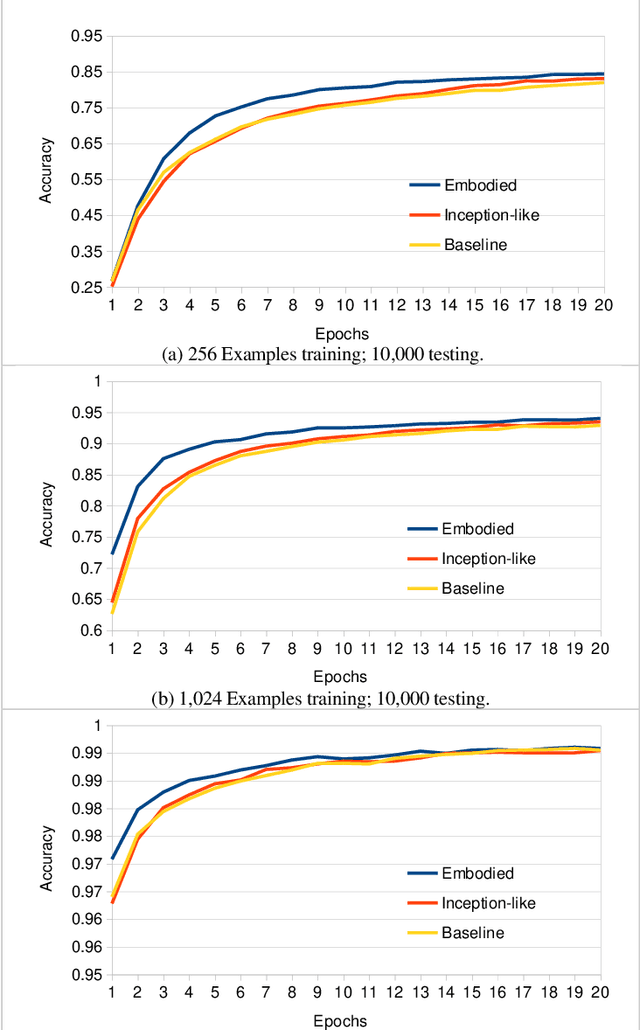
Apr 13, 2026Robots are increasingly entering human-interactive scenarios that require understanding of quantity. How intelligent systems acquire abstract numerical concepts from sensorimotor experience remains a fundamental challenge in cognitive science and artificial intelligence. Here we investigate embodied numerical learning using a neural network model trained to perform sequential counting through naturalistic robotic interaction with a Franka Panda manipulator. We demonstrate that embodied models achieve 96.8\% counting accuracy with only 10\% of training data, compared to 60.6\% for vision-only baselines. This advantage persists when visual-motor correspondences are randomized, indicating that embodiment functions as a structural prior that regularizes learning rather than as an information source. The model spontaneously develops biologically plausible representations: number-selective units with logarithmic tuning, mental number line organization, Weber-law scaling, and rotational dynamics encoding numerical magnitude ($r = 0.97$, slope $= 30.6°$/count). The learning trajectory parallels children's developmental progression from subset-knowers to cardinal-principle knowers. These findings demonstrate that minimal embodiment can ground abstract concepts, improve data efficiency, and yield interpretable representations aligned with biological cognition, which may contribute to embodied mathematics tutoring and safety-critical industrial applications.
Facilitating the Emergence of Assistive Robots to Support Frailty: Psychosocial and Environmental Realities
Sep 10, 2025While assistive robots have much potential to help older people with frailty-related needs, there are few in use. There is a gap between what is developed in laboratories and what would be viable in real-world contexts. Through a series of co-design workshops (61 participants across 7 sessions) including those with lived experience of frailty, their carers, and healthcare professionals, we gained a deeper understanding of everyday issues concerning the place of new technologies in their lives. A persona-based approach surfaced emotional, social, and psychological issues. Any assistive solution must be developed in the context of this complex interplay of psychosocial and environmental factors. Our findings, presented as design requirements in direct relation to frailty, can help promote design thinking that addresses people's needs in a more pragmatic way to move assistive robotics closer to real-world use.
Allostatic Control of Persistent States in Spiking Neural Networks for perception and computation
Mar 20, 2025We introduce a novel model for updating perceptual beliefs about the environment by extending the concept of Allostasis to the control of internal representations. Allostasis is a fundamental regulatory mechanism observed in animal physiology that orchestrates responses to maintain a dynamic equilibrium in bodily needs and internal states. In this paper, we focus on an application in numerical cognition, where a bump of activity in an attractor network is used as a spatial numerical representation. While existing neural networks can maintain persistent states, to date, there is no unified framework for dynamically controlling spatial changes in neuronal activity in response to environmental changes. To address this, we couple a well known allostatic microcircuit, the Hammel model, with a ring attractor, resulting in a Spiking Neural Network architecture that can modulate the location of the bump as a function of some reference input. This localized activity in turn is used as a perceptual belief in a simulated subitization task a quick enumeration process without counting. We provide a general procedure to fine-tune the model and demonstrate the successful control of the bump location. We also study the response time in the model with respect to changes in parameters and compare it with biological data. Finally, we analyze the dynamics of the network to understand the selectivity and specificity of different neurons to distinct categories present in the input. The results of this paper, particularly the mechanism for moving persistent states, are not limited to numerical cognition but can be applied to a wide range of tasks involving similar representations.
Supervised learning of spatial features with STDP and homeostasis using Spiking Neural Networks on SpiNNaker
Dec 05, 2023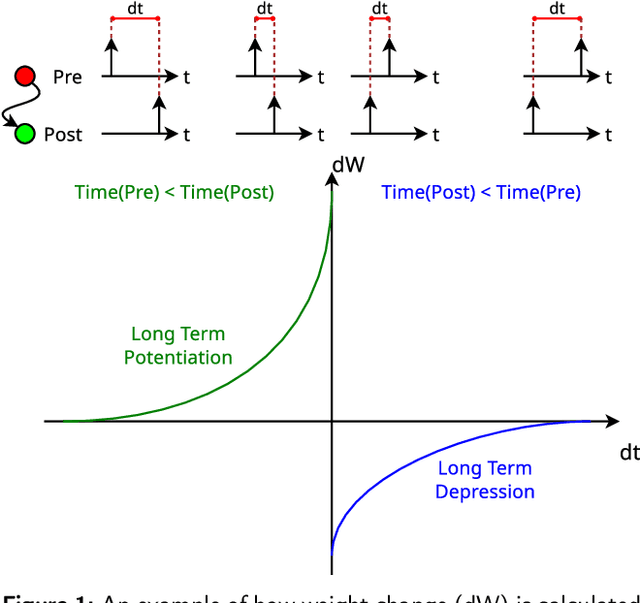

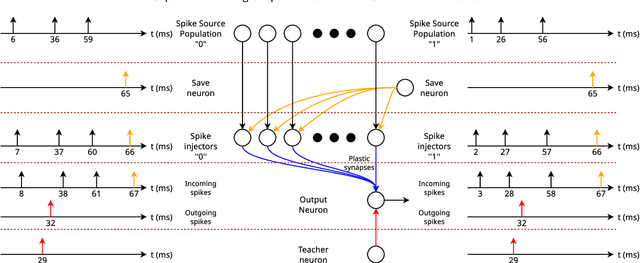
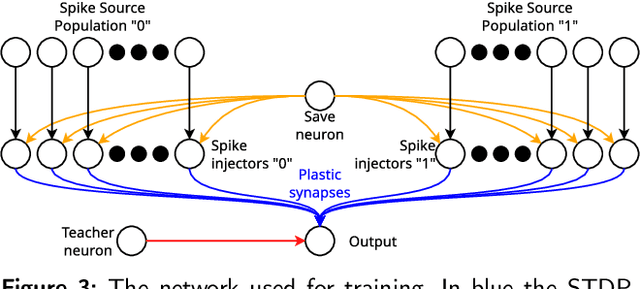
Artificial Neural Networks (ANN) have gained large popularity thanks to their ability to learn using the well-known backpropagation algorithm. On the other hand, Spiking Neural Networks (SNNs), despite having wider abilities than ANNs, have always presented a challenge in the training phase. This paper shows a new method to perform supervised learning on SNNs, using Spike Timing Dependent Plasticity (STDP) and homeostasis, aiming at training the network to identify spatial patterns. The method is tested using the SpiNNaker digital architecture. A SNN is trained to recognise one or multiple patterns and performance metrics are extracted to measure the performance of the network. Some considerations are drawn from the results showing that, in the case of a single trained pattern, the network behaves as the ideal detector, with 100% accuracy in detecting the trained pattern. However, as the number of trained patterns on a single network increases, the accuracy of the identification is linked to the similarities between these patterns. This method of training an SNN to detect spatial patterns may be applied on pattern recognition in static images or traffic analysis in computer networks, where each network packet represents a spatial pattern. It will be stipulated that the homeostatic factor may enable the network to detect patterns with some degree of similarities, rather than only perfectly matching patterns.
Energy Efficient Personalized Hand-Gesture Recognition with Neuromorphic Computing
Jul 25, 2023Hand gestures are a form of non-verbal communication that is used in social interaction and it is therefore required for more natural human-robot interaction. Neuromorphic (brain-inspired) computing offers a low-power solution for Spiking neural networks (SNNs) that can be used for the classification and recognition of gestures. This article introduces the preliminary results of a novel methodology for training spiking convolutional neural networks for hand-gesture recognition so that a humanoid robot with integrated neuromorphic hardware will be able to personalise the interaction with a user according to the shown hand gesture. It also describes other approaches that could improve the overall performance of the model.
Proceeding of the 1st Workshop on Social Robots Personalisation At the crossroads between engineering and humanities
Jul 10, 2023Nowadays, robots are expected to interact more physically, cognitively, and socially with people. They should adapt to unpredictable contexts alongside individuals with various behaviours. For this reason, personalisation is a valuable attribute for social robots as it allows them to act according to a specific user's needs and preferences and achieve natural and transparent robot behaviours for humans. If correctly implemented, personalisation could also be the key to the large-scale adoption of social robotics. However, achieving personalisation is arduous as it requires us to expand the boundaries of robotics by taking advantage of the expertise of various domains. Indeed, personalised robots need to analyse and model user interactions while considering their involvement in the adaptative process. It also requires us to address ethical and socio-cultural aspects of personalised HRI to achieve inclusive and diverse interaction and avoid deception and misplaced trust when interacting with the users. At the same time, policymakers need to ensure regulations in view of possible short-term and long-term adaptive HRI. This workshop aims to raise an interdisciplinary discussion on personalisation in robotics. It aims at bringing researchers from different fields together to propose guidelines for personalisation while addressing the following questions: how to define it - how to achieve it - and how it should be guided to fit legal and ethical requirements.
A Robot that Counts Like a Child -- a Developmental Model of Counting and Pointing
Aug 05, 2020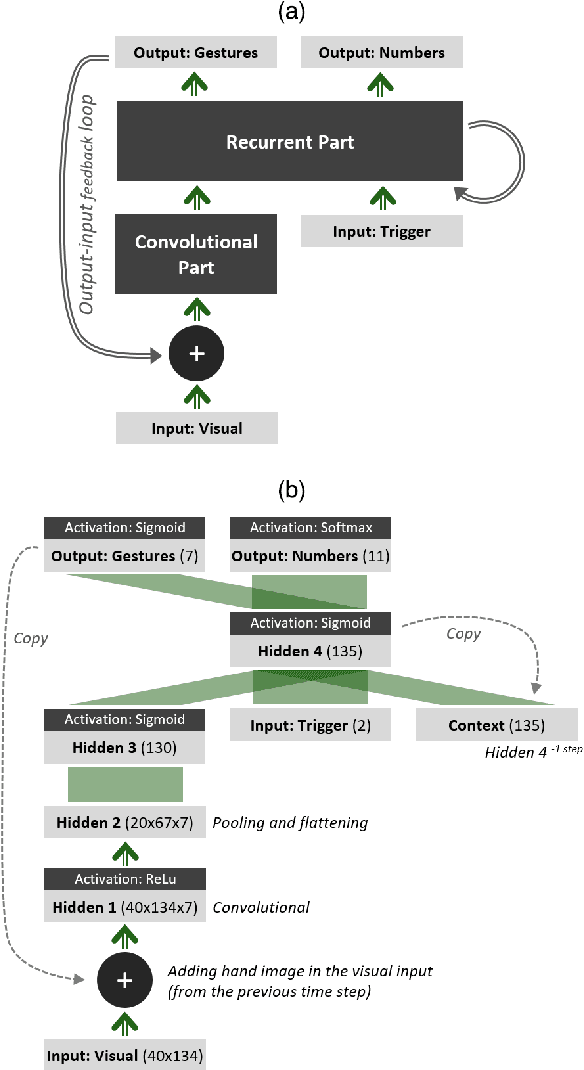
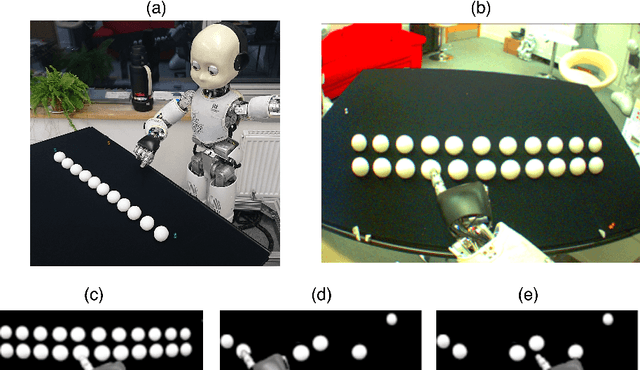
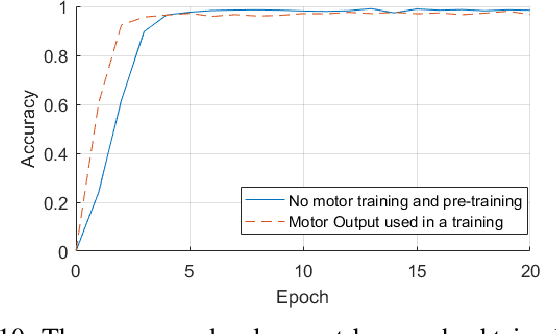
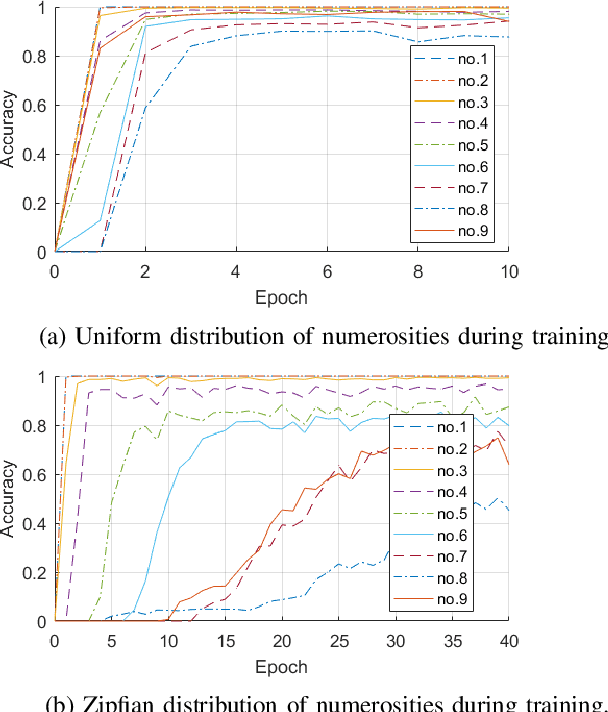
In this paper, a novel neuro-robotics model capable of counting real items is introduced. The model allows us to investigate the interaction between embodiment and numerical cognition. This is composed of a deep neural network capable of image processing and sequential tasks performance, and a robotic platform providing the embodiment - the iCub humanoid robot. The network is trained using images from the robot's cameras and proprioceptive signals from its joints. The trained model is able to count a set of items and at the same time points to them. We investigate the influence of pointing on the counting process and compare our results with those from studies with children. Several training approaches are presented in this paper all of them uses pre-training routine allowing the network to gain the ability of pointing and number recitation (from 1 to 10) prior to counting training. The impact of the counted set size and distance to the objects are investigated. The obtained results on counting performance show similarities with those from human studies.
A Developmental Neuro-Robotics Approach for Boosting the Recognition of Handwritten Digits
Mar 23, 2020
Developmental psychology and neuroimaging research identified a close link between numbers and fingers, which can boost the initial number knowledge in children. Recent evidence shows that a simulation of the children's embodied strategies can improve the machine intelligence too. This article explores the application of embodied strategies to convolutional neural network models in the context of developmental neuro-robotics, where the training information is likely to be gradually acquired while operating rather than being abundant and fully available as the classical machine learning scenarios. The experimental analyses show that the proprioceptive information from the robot fingers can improve network accuracy in the recognition of handwritten Arabic digits when training examples and epochs are few. This result is comparable to brain imaging and longitudinal studies with young children. In conclusion, these findings also support the relevance of the embodiment in the case of artificial agents' training and show a possible way for the humanization of the learning process, where the robotic body can express the internal processes of artificial intelligence making it more understandable for humans.
A Deep Neural Network for Finger Counting and Numerosity Estimation
Jul 09, 2019
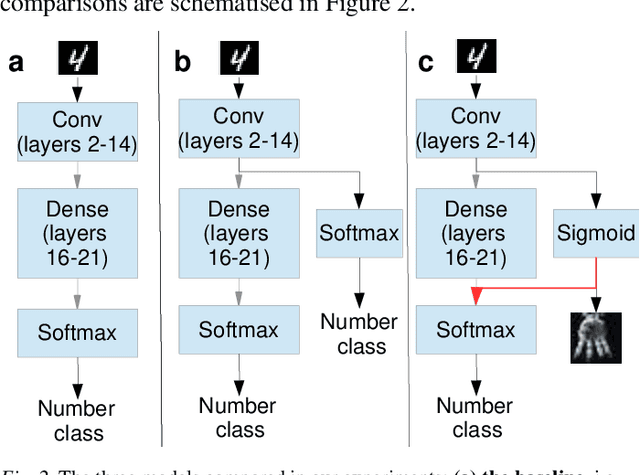
In this paper, we present neuro-robotics models with a deep artificial neural network capable of generating finger counting positions and number estimation. We first train the model in an unsupervised manner where each layer is treated as a Restricted Boltzmann Machine or an autoencoder. Such a model is further trained in a supervised way. This type of pre-training is tested on our baseline model and two methods of pre-training are compared. The network is extended to produce finger counting positions. The performance in number estimation of such an extended model is evaluated. We test the hypothesis if the subitizing process can be obtained by one single model used also for estimation of higher numerosities. The results confirm the importance of unsupervised training in our enumeration task and show some similarities to human behaviour in the case of subitizing.