 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePUCK: Parallel Surface and Convolution-kernel Tracking for Event-Based Cameras
Paper and Code
May 16, 2022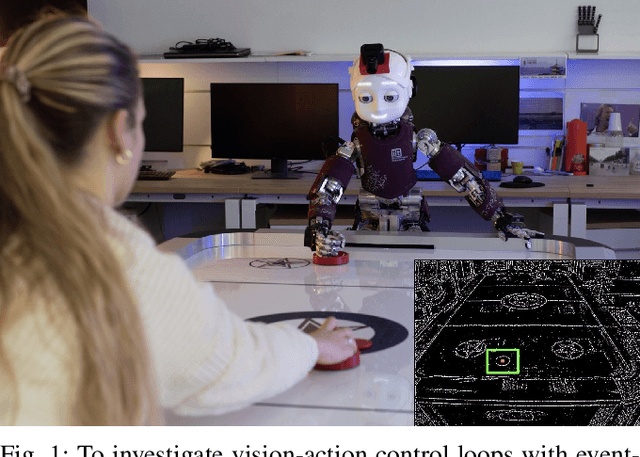
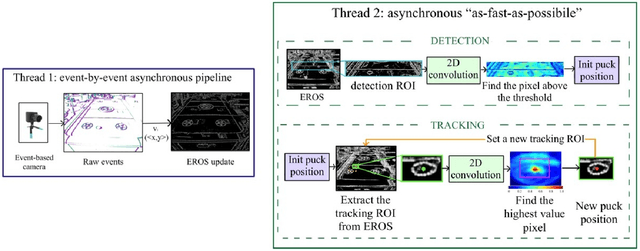
Low latency and accuracy are fundamental requirements when vision is integrated in robots for high-speed interaction with targets, since they affect system reliability and stability. In such a scenario, the choice of the sensor and algorithms is important for the entire control loop. The technology of event-cameras can guarantee fast visual sensing in dynamic environments, but requires a tracking algorithm that can keep up with the high data rate induced by the robot ego-motion while maintaining accuracy and robustness to distractors. In this paper, we introduce a novel tracking method that leverages the Exponential Reduced Ordinal Surface (EROS) data representation to decouple event-by-event processing and tracking computation. The latter is performed using convolution kernels to detect and follow a circular target moving on a plane. To benchmark state-of-the-art event-based tracking, we propose the task of tracking the air hockey puck sliding on a surface, with the future aim of controlling the iCub robot to reach the target precisely and on time. Experimental results demonstrate that our algorithm achieves the best compromise between low latency and tracking accuracy both when the robot is still and when moving.