 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSequence-to-Sequence Natural Language to Humanoid Robot Sign Language
Jul 09, 2019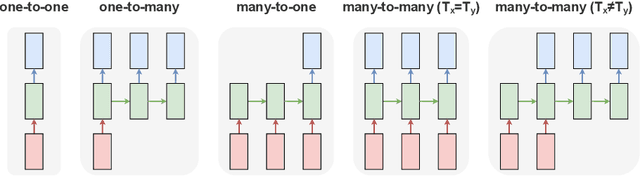
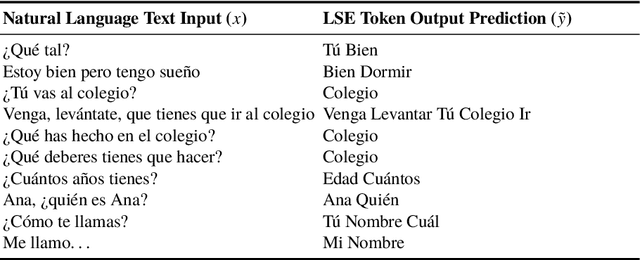
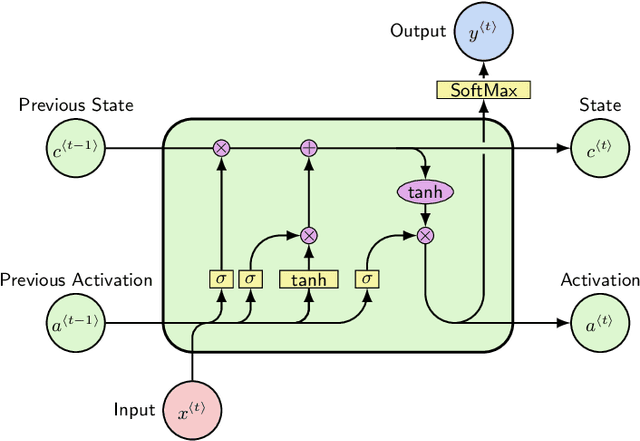
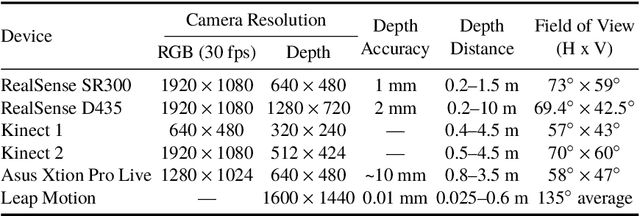
This paper presents a study on natural language to sign language translation with human-robot interaction application purposes. By means of the presented methodology, the humanoid robot TEO is expected to represent Spanish sign language automatically by converting text into movements, thanks to the performance of neural networks. Natural language to sign language translation presents several challenges to developers, such as the discordance between the length of input and output data and the use of non-manual markers. Therefore, neural networks and, consequently, sequence-to-sequence models, are selected as a data-driven system to avoid traditional expert system approaches or temporal dependencies limitations that lead to limited or too complex translation systems. To achieve these objectives, it is necessary to find a way to perform human skeleton acquisition in order to collect the signing input data. OpenPose and skeletonRetriever are proposed for this purpose and a 3D sensor specification study is developed to select the best acquisition hardware.
Independent Motion Detection with Event-driven Cameras
Jul 04, 2017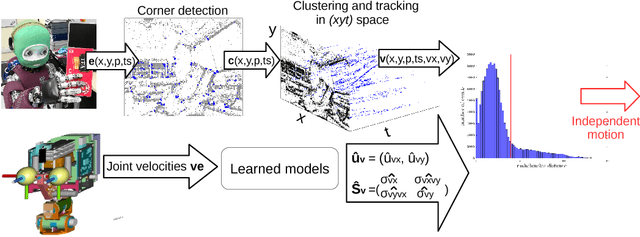
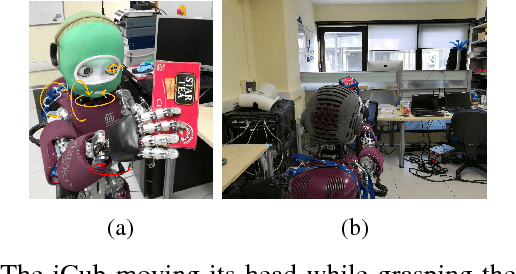
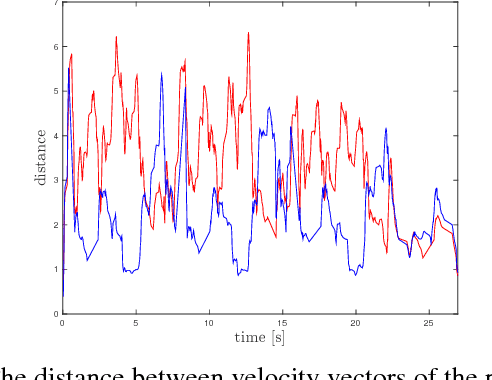
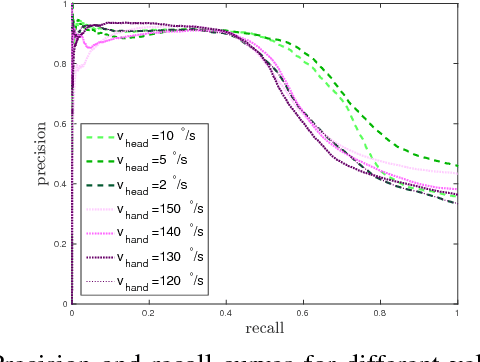
Unlike standard cameras that send intensity images at a constant frame rate, event-driven cameras asynchronously report pixel-level brightness changes, offering low latency and high temporal resolution (both in the order of micro-seconds). As such, they have great potential for fast and low power vision algorithms for robots. Visual tracking, for example, is easily achieved even for very fast stimuli, as only moving objects cause brightness changes. However, cameras mounted on a moving robot are typically non-stationary and the same tracking problem becomes confounded by background clutter events due to the robot ego-motion. In this paper, we propose a method for segmenting the motion of an independently moving object for event-driven cameras. Our method detects and tracks corners in the event stream and learns the statistics of their motion as a function of the robot's joint velocities when no independently moving objects are present. During robot operation, independently moving objects are identified by discrepancies between the predicted corner velocities from ego-motion and the measured corner velocities. We validate the algorithm on data collected from the neuromorphic iCub robot. We achieve a precision of ~ 90 % and show that the method is robust to changes in speed of both the head and the target.