 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTransferring human emotions to robot motions using Neural Policy Style Transfer
Feb 01, 2024
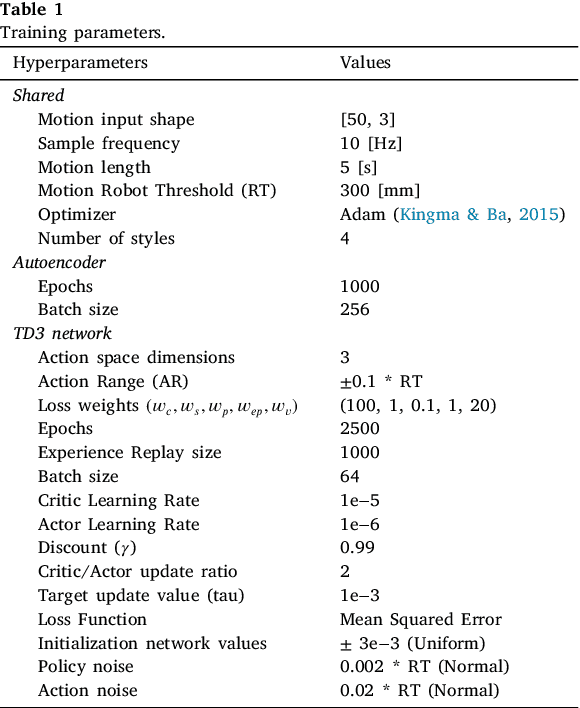
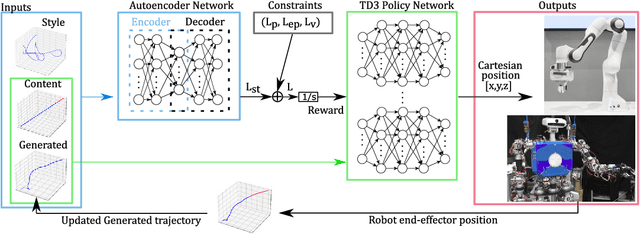
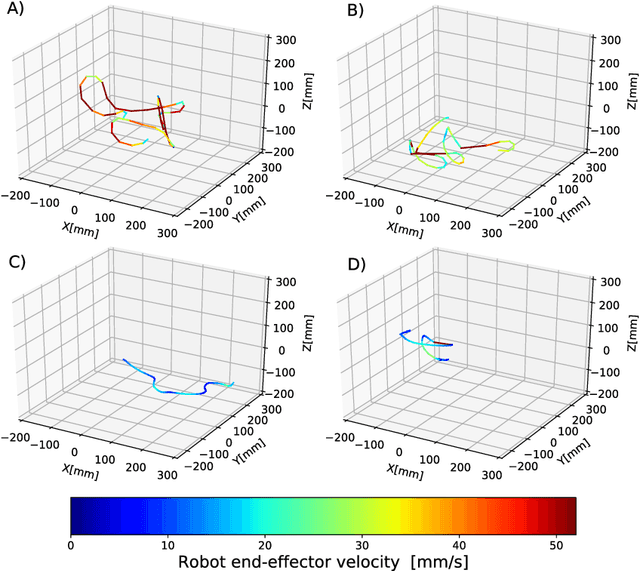
Neural Style Transfer (NST) was originally proposed to use feature extraction capabilities of Neural Networks as a way to perform Style Transfer with images. Pre-trained image classification architectures were selected for feature extraction, leading to new images showing the same content as the original but with a different style. In robotics, Style Transfer can be employed to transfer human motion styles to robot motions. The challenge lies in the lack of pre-trained classification architectures for robot motions that could be used for feature extraction. Neural Policy Style Transfer TD3 (NPST3) is proposed for the transfer of human motion styles to robot motions. This framework allows the same robot motion to be executed in different human-centered motion styles, such as in an angry, happy, calm, or sad fashion. The Twin Delayed Deep Deterministic Policy Gradient (TD3) network is introduced for the generation of control policies. An autoencoder network is in charge of feature extraction for the Style Transfer step. The Style Transfer step can be performed both offline and online: offline for the autonomous executions of human-style robot motions, and online for adapting at runtime the style of e.g., a teleoperated robot. The framework is tested using two different robotic platforms: a robotic manipulator designed for telemanipulation tasks, and a humanoid robot designed for social interaction. The proposed approach was evaluated for both platforms, performing a total of 147 questionnaires asking human subjects to recognize the human motion style transferred to the robot motion for a predefined set of actions.
Sequence-to-Sequence Natural Language to Humanoid Robot Sign Language
Jul 09, 2019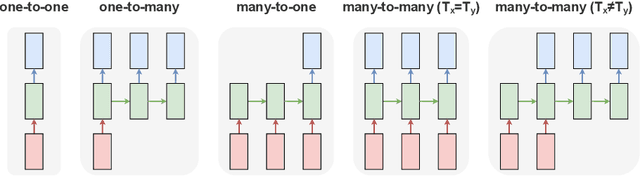
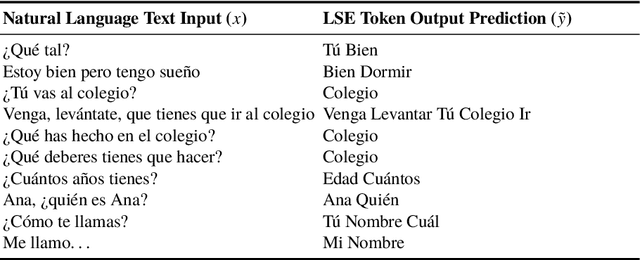
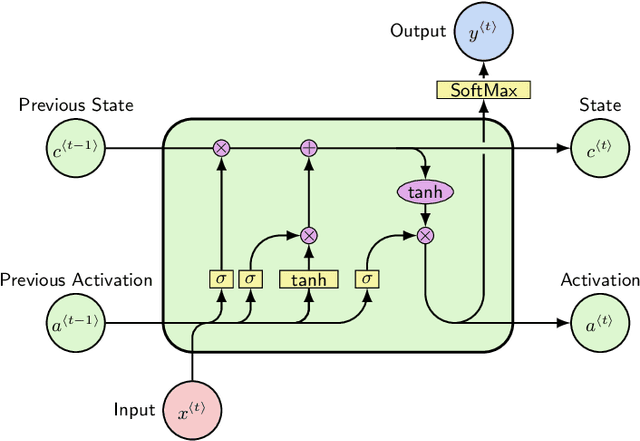
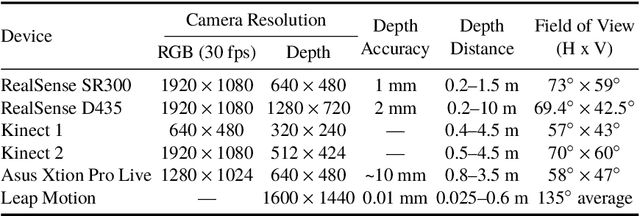
This paper presents a study on natural language to sign language translation with human-robot interaction application purposes. By means of the presented methodology, the humanoid robot TEO is expected to represent Spanish sign language automatically by converting text into movements, thanks to the performance of neural networks. Natural language to sign language translation presents several challenges to developers, such as the discordance between the length of input and output data and the use of non-manual markers. Therefore, neural networks and, consequently, sequence-to-sequence models, are selected as a data-driven system to avoid traditional expert system approaches or temporal dependencies limitations that lead to limited or too complex translation systems. To achieve these objectives, it is necessary to find a way to perform human skeleton acquisition in order to collect the signing input data. OpenPose and skeletonRetriever are proposed for this purpose and a 3D sensor specification study is developed to select the best acquisition hardware.