 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTransferring human emotions to robot motions using Neural Policy Style Transfer
Paper and Code

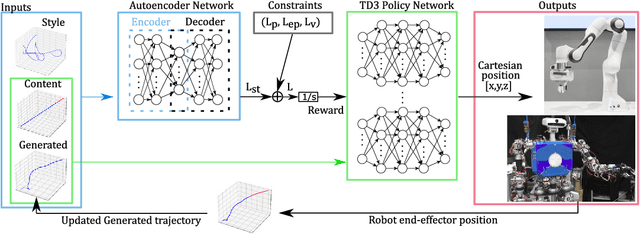
Neural Style Transfer (NST) was originally proposed to use feature extraction capabilities of Neural Networks as a way to perform Style Transfer with images. Pre-trained image classification architectures were selected for feature extraction, leading to new images showing the same content as the original but with a different style. In robotics, Style Transfer can be employed to transfer human motion styles to robot motions. The challenge lies in the lack of pre-trained classification architectures for robot motions that could be used for feature extraction. Neural Policy Style Transfer TD3 (NPST3) is proposed for the transfer of human motion styles to robot motions. This framework allows the same robot motion to be executed in different human-centered motion styles, such as in an angry, happy, calm, or sad fashion. The Twin Delayed Deep Deterministic Policy Gradient (TD3) network is introduced for the generation of control policies. An autoencoder network is in charge of feature extraction for the Style Transfer step. The Style Transfer step can be performed both offline and online: offline for the autonomous executions of human-style robot motions, and online for adapting at runtime the style of e.g., a teleoperated robot. The framework is tested using two different robotic platforms: a robotic manipulator designed for telemanipulation tasks, and a humanoid robot designed for social interaction. The proposed approach was evaluated for both platforms, performing a total of 147 questionnaires asking human subjects to recognize the human motion style transferred to the robot motion for a predefined set of actions.