 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWaLiN-GUI: a graphical and auditory tool for neuron-based encoding
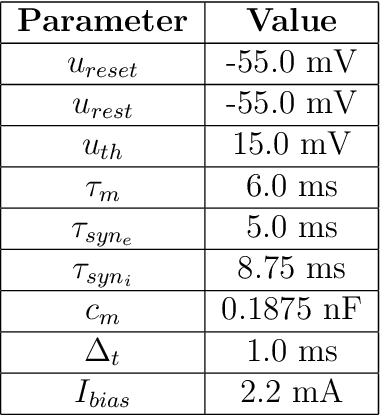
Oct 25, 2023Neuromorphic computing relies on spike-based, energy-efficient communication, inherently implying the need for conversion between real-valued (sensory) data and binary, sparse spiking representation. This is usually accomplished using the real valued data as current input to a spiking neuron model, and tuning the neuron's parameters to match a desired, often biologically inspired behaviour. We developed a tool, the WaLiN-GUI, that supports the investigation of neuron models and parameter combinations to identify suitable configurations for neuron-based encoding of sample-based data into spike trains. Due to the generalized LIF model implemented by default, next to the LIF and Izhikevich neuron models, many spiking behaviors can be investigated out of the box, thus offering the possibility of tuning biologically plausible responses to the input data. The GUI is provided open source and with documentation, being easy to extend with further neuron models and personalize with data analysis functions.
Development of an interface for digital neuromorphic hardware based on an FPGA
Aug 17, 2023Exploring and understanding the functioning of the human brain is one of the greatest challenges for current research. Neuromorphic engineering tries to address this challenge by abstracting biological mechanisms and translating them into technology. Via the abstraction process and experiments with the resulting technical system, an attempt is made to obtain information about the biological counterpart. One subsection of Neuromorphic Engineering (NE) are Spiking Neural Networks (SNN), which describe the structures of the human brain more and more closely than Artificial Neural Networks (ANN). Together with their dedicated hardware, SNNs provide a good platform for developing new algorithms for information processing. In the context of these neuromorphic hardware platforms, this paper aims to develop an interface for a digital hardware platform (SPINN-3 Development Board) to enable the use of industrial or conventional sensors and thus create new approaches for experimental research. The basis for this endeavor is a Field Programmable Gate Array (FPGA), which is placed as a gateway between the sensors and the neuromorphic hardware. Overall, the developed system provides a robust solution for a wide variety of investigations related to neuromorphic hardware and SNNs. Furthermore, the solution also offers suitable possibilities to monitor all processes within the system in order to obtain suitable measurements, which can be examined in search of meaningful results.
Modelling and simulation of a commercially available dielectric elastomer actuator
Aug 03, 2023In order to fully harness the potential of dielectric elastomer actu-ators (DEAs) in soft robots, advanced control methods are need-ed. An important groundwork for this is the development of a control-oriented model that can adequately describe the underly-ing dynamics of a DEA. A common feature of existing models is that always custom-made DEAs were investigated. This makes the modelling process easier, as all specifications and the struc-ture of the actuator are well known. In the case of a commercial actuator, however, only the information from the manufacturer is available and must be checked or completed during the modelling process. The aim of this paper is to explore how a commercial stacked silicone-based DEA can be modelled and how complex the model should be to properly replicate the features of the actu-ator. The static description has demonstrated the suitability of Hooke's law. In the case of dynamic description, it is shown that no viscoelastic model is needed for control-oriented modelling. However, if all features of the DEA are considered, the general-ized Kelvin-Maxwell model with three Maxwell elements shows good results, stability and computational efficiency.
ETLP: Event-based Three-factor Local Plasticity for online learning with neuromorphic hardware
Jan 24, 2023Neuromorphic perception with event-based sensors, asynchronous hardware and spiking neurons is showing promising results for real-time and energy-efficient inference in embedded systems. The next promise of brain-inspired computing is to enable adaptation to changes at the edge with online learning. However, the parallel and distributed architectures of neuromorphic hardware based on co-localized compute and memory imposes locality constraints to the on-chip learning rules. We propose in this work the Event-based Three-factor Local Plasticity (ETLP) rule that uses (1) the pre-synaptic spike trace, (2) the post-synaptic membrane voltage and (3) a third factor in the form of projected labels with no error calculation, that also serve as update triggers. We apply ETLP with feedforward and recurrent spiking neural networks on visual and auditory event-based pattern recognition, and compare it to Back-Propagation Through Time (BPTT) and eProp. We show a competitive performance in accuracy with a clear advantage in the computational complexity for ETLP. We also show that when using local plasticity, threshold adaptation in spiking neurons and a recurrent topology are necessary to learn spatio-temporal patterns with a rich temporal structure. Finally, we provide a proof of concept hardware implementation of ETLP on FPGA to highlight the simplicity of its computational primitives and how they can be mapped into neuromorphic hardware for online learning with low-energy consumption and real-time interaction.
Real-time detection of uncalibrated sensors using Neural Networks
Feb 02, 2021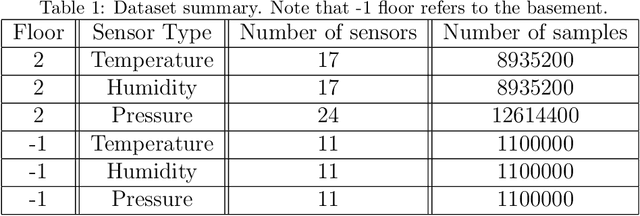
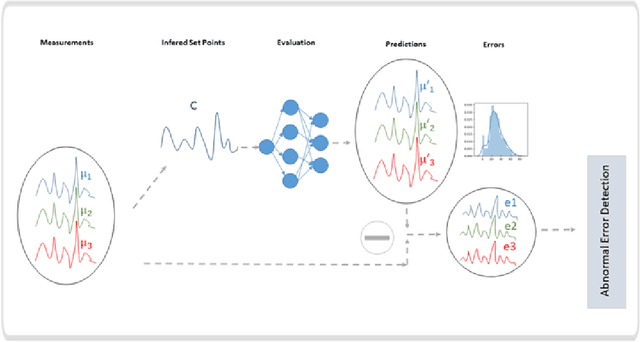
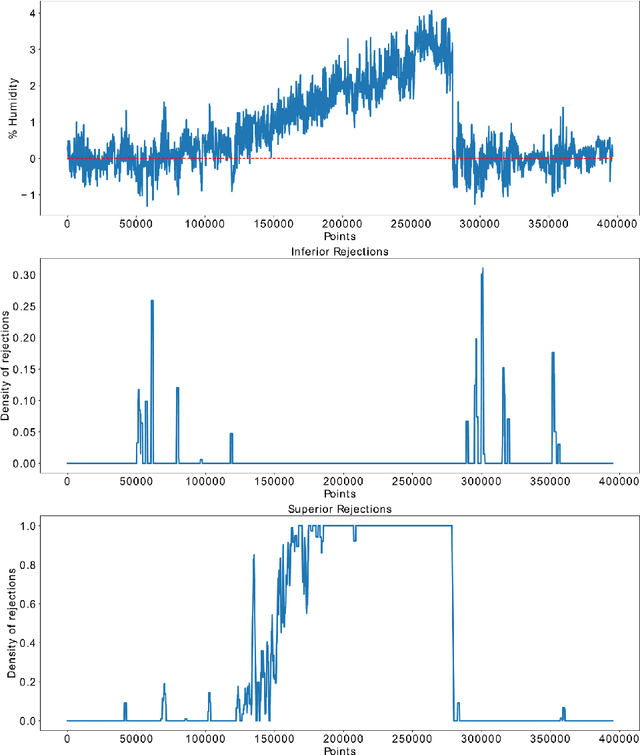
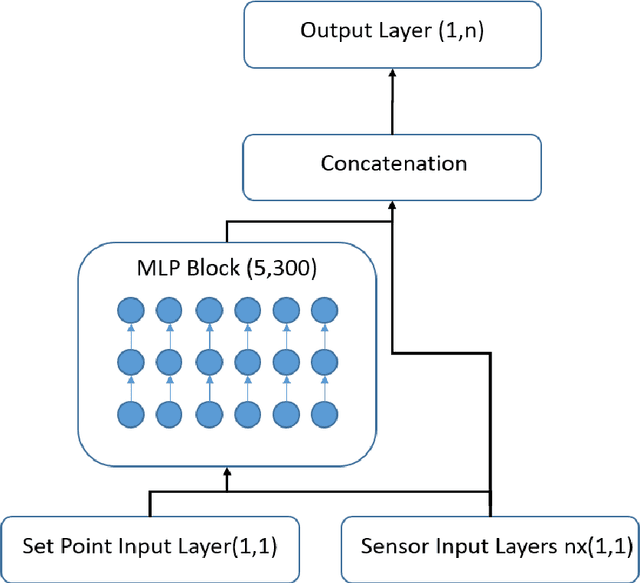
Nowadays, sensors play a major role in several contexts like science, industry and daily life which benefit of their use. However, the retrieved information must be reliable. Anomalies in the behavior of sensors can give rise to critical consequences such as ruining a scientific project or jeopardizing the quality of the production in industrial production lines. One of the more subtle kind of anomalies are uncalibrations. An uncalibration is said to take place when the sensor is not adjusted or standardized by calibration according to a ground truth value. In this work, an online machine-learning based uncalibration detector for temperature, humidity and pressure sensors was developed. This solution integrates an Artificial Neural Network as main component which learns from the behavior of the sensors under calibrated conditions. Then, after trained and deployed, it detects uncalibrations once they take place. The obtained results show that the proposed solution is able to detect uncalibrations for deviation values of 0.25 degrees, 1% RH and 1.5 Pa, respectively. This solution can be adapted to different contexts by means of transfer learning, whose application allows for the addition of new sensors, the deployment into new environments and the retraining of the model with minimum amounts of data.
Neuromorphic adaptive spiking CPG towards bio-inspired locomotion of legged robots
Jan 24, 2021


In recent years, locomotion mechanisms exhibited by vertebrate animals have been the inspiration for the improvement in the performance of robotic systems. These mechanisms include the adaptability of their locomotion to any change registered in the environment through their biological sensors. In this regard, we aim to replicate such kind of adaptability in legged robots through a Spiking Central Pattern Generator. This Spiking Central Pattern Generator generates different locomotion (rhythmic) patterns which are driven by an external stimulus, that is, the output of a Force Sensitive Resistor connected to the robot to provide feedback. The Spiking Central Pattern Generator consists of a network of five populations of Leaky Integrate-and-Fire neurons designed with a specific topology in such a way that the rhythmic patterns can be generated and driven by the aforementioned external stimulus. Therefore, the locomotion of the end robotic platform (any-legged robot) can be adapted to the terrain by using any sensor as input. The Spiking Central Pattern Generator with adaptive learning has been numerically validated at software and hardware level, using the Brian 2 simulator and the SpiNNaker neuromorphic platform for the latest. In particular, our experiments clearly show an adaptation in the oscillation frequencies between the spikes produced in the populations of the Spiking Central Pattern Generator while the input stimulus varies. To validate the robustness and adaptability of the Spiking Central Pattern Generator, we have performed several tests by variating the output of the sensor. These experiments were carried out in Brian 2 and SpiNNaker; both implementations showed a similar behavior with a Pearson correlation coefficient of 0.905.