 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient Synaptic Delay Implementation in Digital Event-Driven AI Accelerators
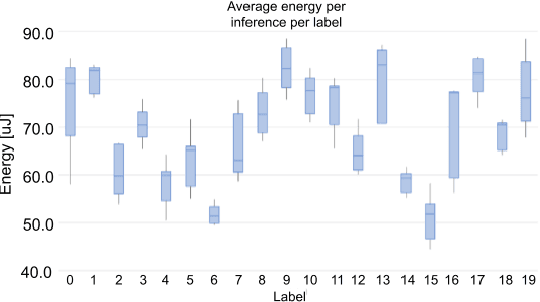
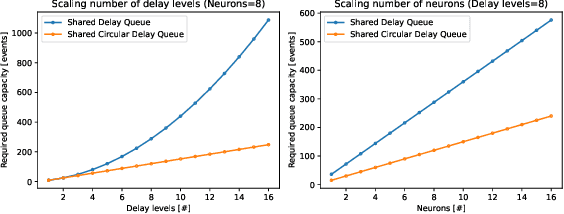
Jan 23, 2025Synaptic delay parameterization of neural network models have remained largely unexplored but recent literature has been showing promising results, suggesting the delay parameterized models are simpler, smaller, sparser, and thus more energy efficient than similar performing (e.g. task accuracy) non-delay parameterized ones. We introduce Shared Circular Delay Queue (SCDQ), a novel hardware structure for supporting synaptic delays on digital neuromorphic accelerators. Our analysis and hardware results show that it scales better in terms of memory, than current commonly used approaches, and is more amortizable to algorithm-hardware co-optimizations, where in fact, memory scaling is modulated by model sparsity and not merely network size. Next to memory we also report performance on latency area and energy per inference.
Hardware-aware training of models with synaptic delays for digital event-driven neuromorphic processors
Apr 16, 2024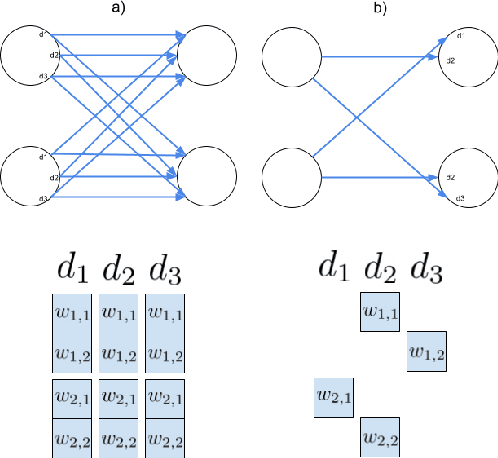
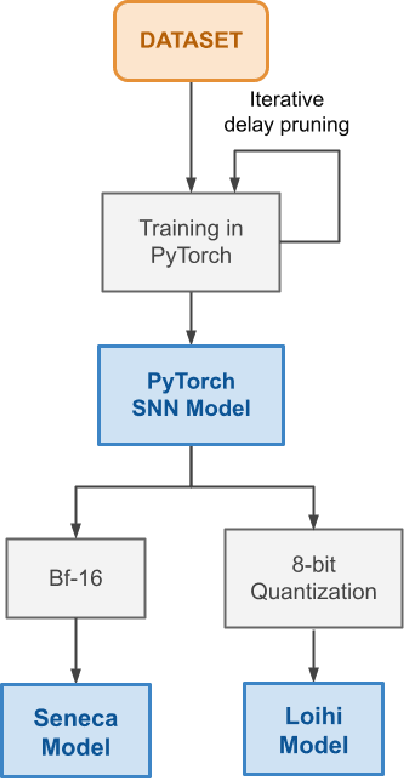
Configurable synaptic delays are a basic feature in many neuromorphic neural network hardware accelerators. However, they have been rarely used in model implementations, despite their promising impact on performance and efficiency in tasks that exhibit complex (temporal) dynamics, as it has been unclear how to optimize them. In this work, we propose a framework to train and deploy, in digital neuromorphic hardware, highly performing spiking neural network models (SNNs) where apart from the synaptic weights, the per-synapse delays are also co-optimized. Leveraging spike-based back-propagation-through-time, the training accounts for both platform constraints, such as synaptic weight precision and the total number of parameters per core, as a function of the network size. In addition, a delay pruning technique is used to reduce memory footprint with a low cost in performance. We evaluate trained models in two neuromorphic digital hardware platforms: Intel Loihi and Imec Seneca. Loihi offers synaptic delay support using the so-called Ring-Buffer hardware structure. Seneca does not provide native hardware support for synaptic delays. A second contribution of this paper is therefore a novel area- and memory-efficient hardware structure for acceleration of synaptic delays, which we have integrated in Seneca. The evaluated benchmark involves several models for solving the SHD (Spiking Heidelberg Digits) classification task, where minimal accuracy degradation during the transition from software to hardware is demonstrated. To our knowledge, this is the first work showcasing how to train and deploy hardware-aware models parameterized with synaptic delays, on multicore neuromorphic hardware accelerators.
Neuromorphic adaptive spiking CPG towards bio-inspired locomotion of legged robots
Jan 24, 2021


In recent years, locomotion mechanisms exhibited by vertebrate animals have been the inspiration for the improvement in the performance of robotic systems. These mechanisms include the adaptability of their locomotion to any change registered in the environment through their biological sensors. In this regard, we aim to replicate such kind of adaptability in legged robots through a Spiking Central Pattern Generator. This Spiking Central Pattern Generator generates different locomotion (rhythmic) patterns which are driven by an external stimulus, that is, the output of a Force Sensitive Resistor connected to the robot to provide feedback. The Spiking Central Pattern Generator consists of a network of five populations of Leaky Integrate-and-Fire neurons designed with a specific topology in such a way that the rhythmic patterns can be generated and driven by the aforementioned external stimulus. Therefore, the locomotion of the end robotic platform (any-legged robot) can be adapted to the terrain by using any sensor as input. The Spiking Central Pattern Generator with adaptive learning has been numerically validated at software and hardware level, using the Brian 2 simulator and the SpiNNaker neuromorphic platform for the latest. In particular, our experiments clearly show an adaptation in the oscillation frequencies between the spikes produced in the populations of the Spiking Central Pattern Generator while the input stimulus varies. To validate the robustness and adaptability of the Spiking Central Pattern Generator, we have performed several tests by variating the output of the sensor. These experiments were carried out in Brian 2 and SpiNNaker; both implementations showed a similar behavior with a Pearson correlation coefficient of 0.905.