 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeuromorphic adaptive spiking CPG towards bio-inspired locomotion of legged robots
Paper and Code
Jan 24, 2021
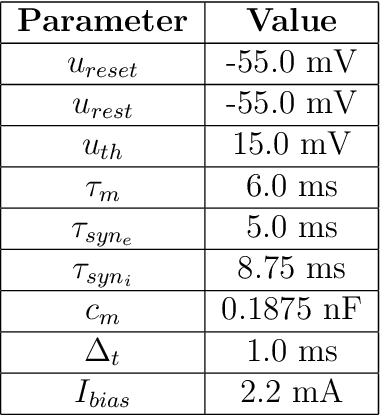


In recent years, locomotion mechanisms exhibited by vertebrate animals have been the inspiration for the improvement in the performance of robotic systems. These mechanisms include the adaptability of their locomotion to any change registered in the environment through their biological sensors. In this regard, we aim to replicate such kind of adaptability in legged robots through a Spiking Central Pattern Generator. This Spiking Central Pattern Generator generates different locomotion (rhythmic) patterns which are driven by an external stimulus, that is, the output of a Force Sensitive Resistor connected to the robot to provide feedback. The Spiking Central Pattern Generator consists of a network of five populations of Leaky Integrate-and-Fire neurons designed with a specific topology in such a way that the rhythmic patterns can be generated and driven by the aforementioned external stimulus. Therefore, the locomotion of the end robotic platform (any-legged robot) can be adapted to the terrain by using any sensor as input. The Spiking Central Pattern Generator with adaptive learning has been numerically validated at software and hardware level, using the Brian 2 simulator and the SpiNNaker neuromorphic platform for the latest. In particular, our experiments clearly show an adaptation in the oscillation frequencies between the spikes produced in the populations of the Spiking Central Pattern Generator while the input stimulus varies. To validate the robustness and adaptability of the Spiking Central Pattern Generator, we have performed several tests by variating the output of the sensor. These experiments were carried out in Brian 2 and SpiNNaker; both implementations showed a similar behavior with a Pearson correlation coefficient of 0.905.