 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBraille Letter Reading: A Benchmark for Spatio-Temporal Pattern Recognition on Neuromorphic Hardware
May 30, 2022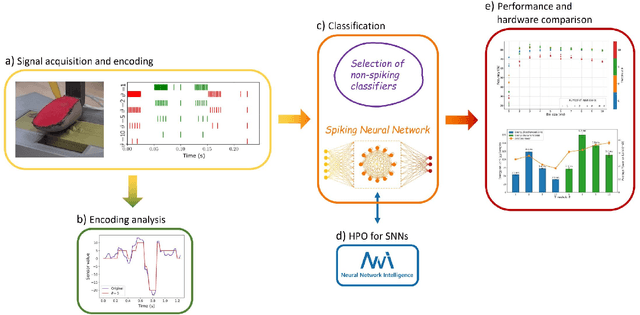
Spatio-temporal pattern recognition is a fundamental ability of the brain which is required for numerous real-world applications. Recent deep learning approaches have reached outstanding accuracy in such tasks, but their implementation on conventional embedded solutions is still very computationally and energy expensive. Tactile sensing in robotic applications is a representative example where real-time processing and energy-efficiency are required. Following a brain-inspired computing approach, we propose a new benchmark for spatio-temporal tactile pattern recognition at the edge through braille letters reading. We recorded a new braille letters dataset based on the capacitive tactile sensors/fingertip of the iCub robot, then we investigated the importance of temporal information and the impact of event-based encoding for spike-based/event-based computation. Afterwards, we trained and compared feed-forward and recurrent spiking neural networks (SNNs) offline using back-propagation through time with surrogate gradients, then we deployed them on the Intel Loihi neuromorphic chip for fast and efficient inference. We confronted our approach to standard classifiers, in particular to a Long Short-Term Memory (LSTM) deployed on the embedded Nvidia Jetson GPU in terms of classification accuracy, power/energy consumption and computational delay. Our results show that the LSTM outperforms the recurrent SNN in terms of accuracy by 14%. However, the recurrent SNN on Loihi is 237 times more energy-efficient than the LSTM on Jetson, requiring an average power of only 31mW. This work proposes a new benchmark for tactile sensing and highlights the challenges and opportunities of event-based encoding, neuromorphic hardware and spike-based computing for spatio-temporal pattern recognition at the edge.