 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImpact-Friendly Object Catching at Non-Zero Velocity based on Hybrid Optimization and Learning
Sep 26, 2022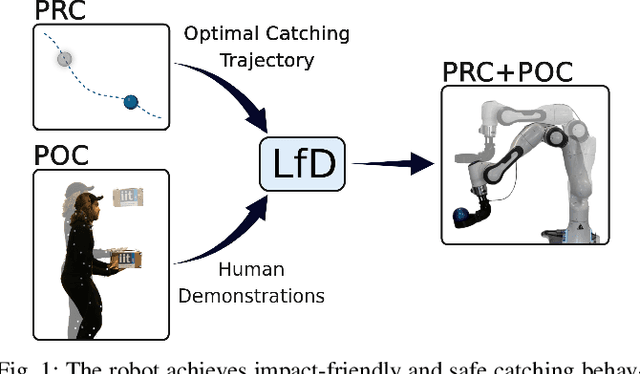
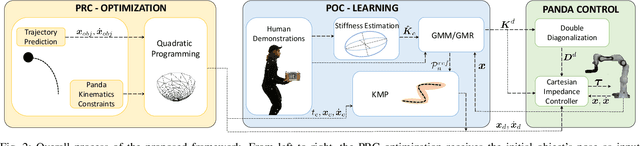
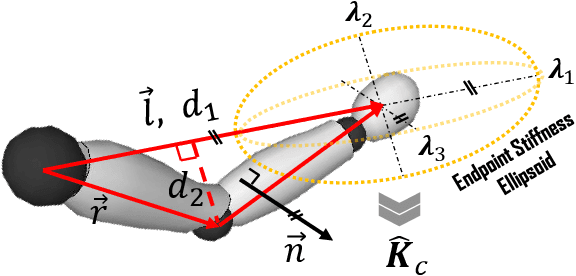

This paper proposes a hybrid optimization and learning method for impact-friendly catching objects at non-zero velocity. Through a constrained Quadratic Programming problem, the method generates optimal trajectories up to the contact point between the robot and the object to minimize their relative velocity and reduce the initial impact forces. Next, the generated trajectories are updated by Kernelized Movement Primitives which are based on human catching demonstrations to ensure a smooth transition around the catching point. In addition, the learned human variable stiffness (HVS) is sent to the robot's Cartesian impedance controller to absorb the post-impact forces and stabilize the catching position. Three experiments are conducted to compare our method with and without HVS against a fixed-position impedance controller (FP-IC). The results showed that the proposed methods outperform the FP-IC, while adding HVS yields better results for absorbing the post-impact forces.