 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComputer-Vision Based Real Time Waypoint Generation for Autonomous Vineyard Navigation with Quadruped Robots
May 02, 2023The VINUM project seeks to address the shortage of skilled labor in modern vineyards by introducing a cutting-edge mobile robotic solution. Leveraging the capabilities of the quadruped robot, HyQReal, this system, equipped with arm and vision sensors, offers autonomous navigation and winter pruning of grapevines reducing the need for human intervention. At the heart of this approach lies an architecture that empowers the robot to easily navigate vineyards, identify grapevines with unparalleled accuracy, and approach them for pruning with precision. A state machine drives the process, deftly switching between various stages to ensure seamless and efficient task completion. The system's performance was assessed through experimentation, focusing on waypoint precision and optimizing the robot's workspace for single-plant operations. Results indicate that the architecture is highly reliable, with a mean error of 21.5cm and a standard deviation of 17.6cm for HyQReal. However, improvements in grapevine detection accuracy are necessary for optimal performance. This work is based on a computer-vision-based navigation method for quadruped robots in vineyards, opening up new possibilities for selective task automation. The system's architecture works well in ideal weather conditions, generating and arriving at precise waypoints that maximize the attached robotic arm's workspace. This work is an extension of our short paper presented at the Italian Conference on Robotics and Intelligent Machines (I-RIM).
Error Tolerant Multi-Robot System for Roadside Trash Collection
Jan 04, 2023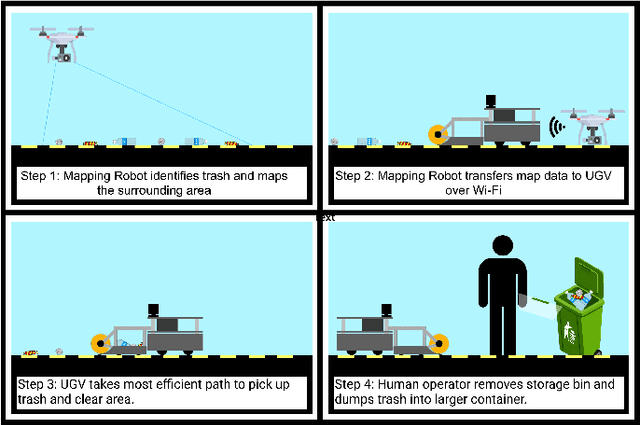
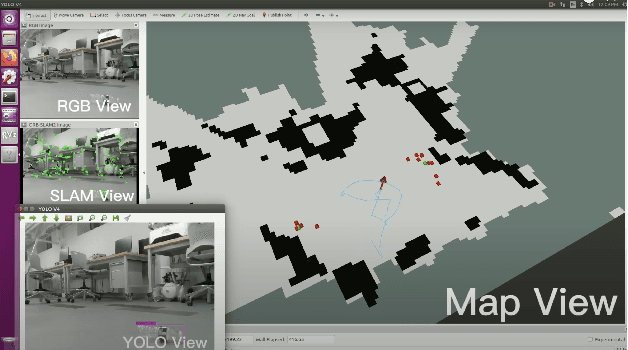
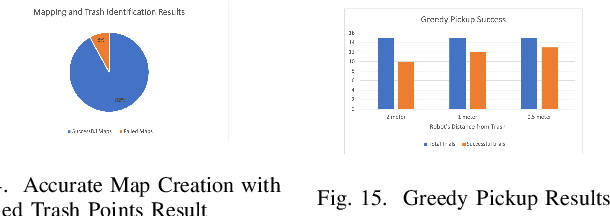
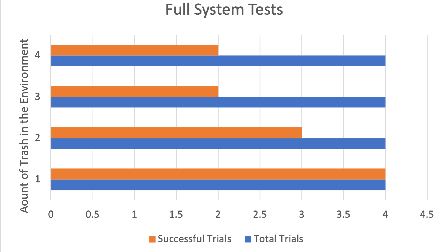
In this paper, we present the first iteration of an error-tolerant, autonomous, multi-robot system that monitors highway road verges and identifies and collects roadside litter. It is designed to use an aerial vehicle that can rapidly cover a vast area and collect data on the road verge. This data is then passed to a ground vehicle that constructs a map of the road verge and uses a trained Convolutional Neural Network (CNN) to identify pieces of litter. After the pieces of litter are identified on the map of the road verge, the ground robot navigates to each piece of trash, re-evaluates the area, and performs a "greedy pickup" procedure. This final stage accounts for any error in the map's construction or the identified trash's location. We found that ending the robotic system's control flow with a greedy pickup procedure can retroactively account for processing errors of the system as it runs. This increases the system's fault tolerance and allows for the use of cheaper equipment since pinpoint accuracy is not always necessary. In this paper, we present the feasibility of this system by testing in simulation and later using real robotic hardware. We show that the system is effective enough to iterate on its design principles to create a more sophisticated system.
Towards Computer-Vision Based Vineyard Navigation for Quadruped Robots
Jan 02, 2023There is a dramatic shortage of skilled labor for modern vineyards. The Vinum project is developing a mobile robotic solution to autonomously navigate through vineyards for winter grapevine pruning. This necessitates an autonomous navigation stack for the robot pruning a vineyard. The Vinum project is using the quadruped robot HyQReal. This paper introduces an architecture for a quadruped robot to autonomously move through a vineyard by identifying and approaching grapevines for pruning. The higher level control is a state machine switching between searching for destination positions, autonomously navigating towards those locations, and stopping for the robot to complete a task. The destination points are determined by identifying grapevine trunks using instance segmentation from a Mask Region-Based Convolutional Neural Network (Mask-RCNN). These detections are sent through a filter to avoid redundancy and remove noisy detections. The combination of these features is the basis for the proposed architecture.