 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Precise Pruning Points Detection using Semantic-Instance-Aware Plant Models for Grapevine Winter Pruning Automation
Sep 15, 2021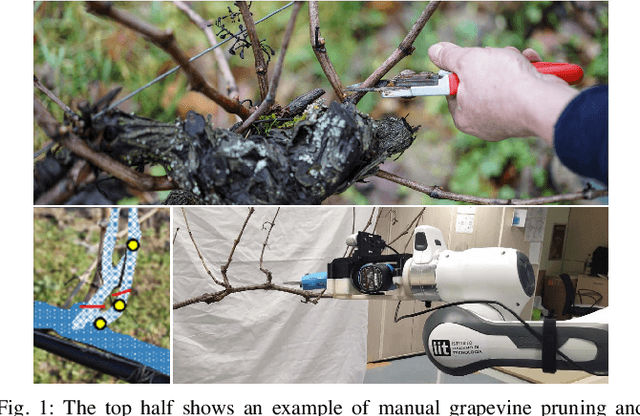
Grapevine winter pruning is a complex task, that requires skilled workers to execute it correctly. The complexity makes it time consuming. It is an operation that requires about 80-120 hours per hectare annually, making an automated robotic system that helps in speeding up the process a crucial tool in large-size vineyards. We will describe (a) a novel expert annotated dataset for grapevine segmentation, (b) a state of the art neural network implementation and (c) generation of pruning points following agronomic rules, leveraging the simplified structure of the plant. With this approach, we are able to generate a set of pruning points on the canes, paving the way towards a correct automation of grapevine winter pruning.
Grapevine Winter Pruning Automation: On Potential Pruning Points Detection through 2D Plant Modeling using Grapevine Segmentation
Jun 08, 2021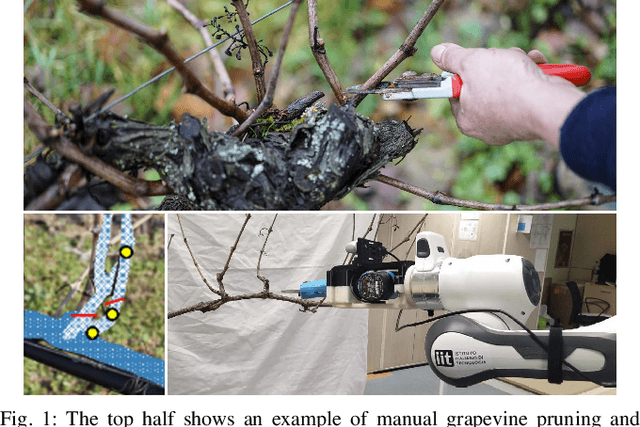

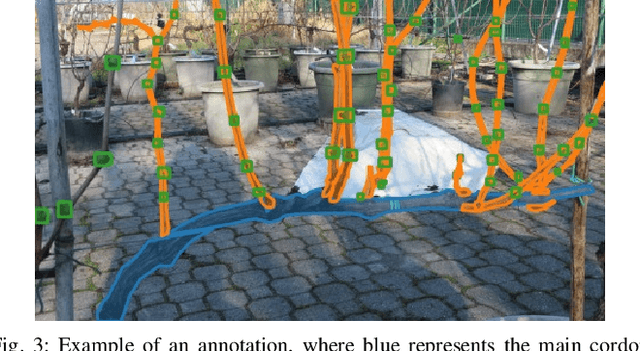
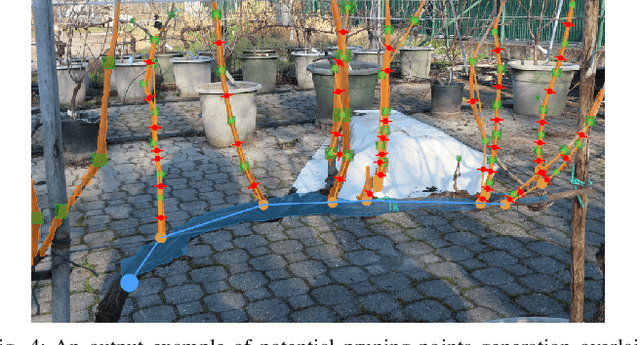
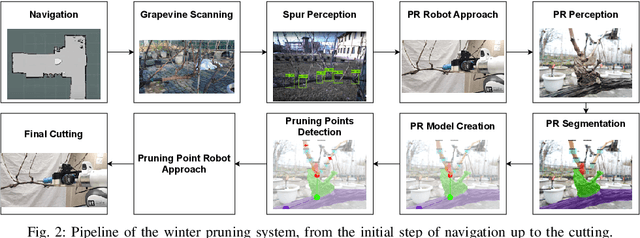
Grapevine winter pruning is a complex task, that requires skilled workers to execute it correctly. The complexity of this task is also the reason why it is time consuming. Considering that this operation takes about 80-120 hours/ha to be completed, and therefore is even more crucial in large-size vineyards, an automated system can help to speed up the process. To this end, this paper presents a novel multidisciplinary approach that tackles this challenging task by performing object segmentation on grapevine images, used to create a representative model of the grapevine plants. Second, a set of potential pruning points is generated from this plant representation. We will describe (a) a methodology for data acquisition and annotation, (b) a neural network fine-tuning for grapevine segmentation, (c) an image processing based method for creating the representative model of grapevines, starting from the inferred segmentation and (d) potential pruning points detection and localization, based on the plant model which is a simplification of the grapevine structure. With this approach, we are able to identify a significant set of potential pruning points on the canes, that can be used, with further selection, to derive the final set of the real pruning points.
Whole-Body Control on Non-holonomic Mobile Manipulation for Grapevine Winter Pruning Automation
May 22, 2021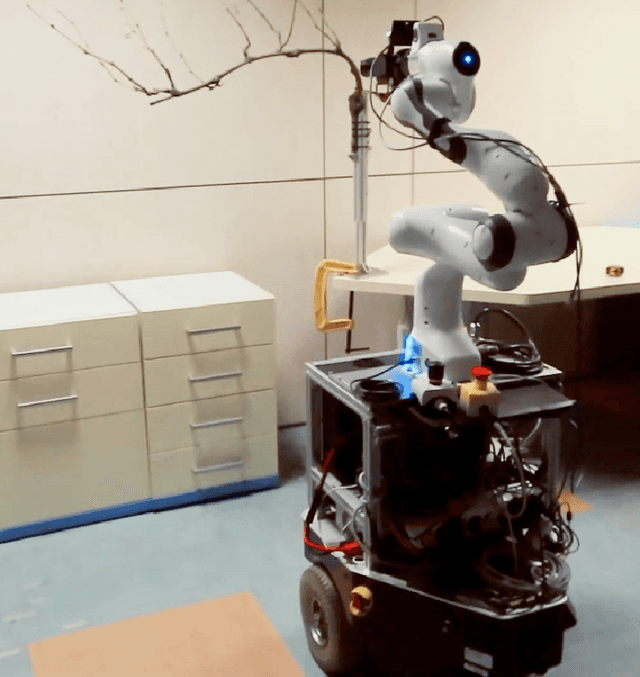
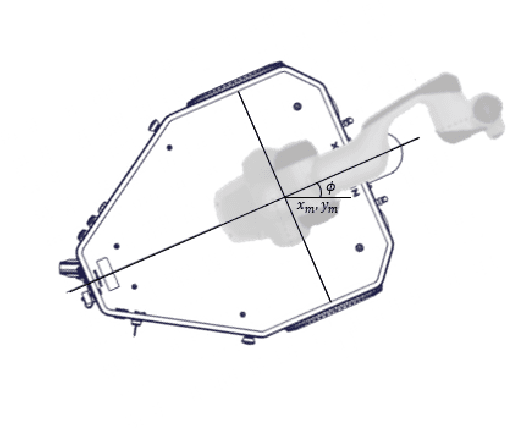
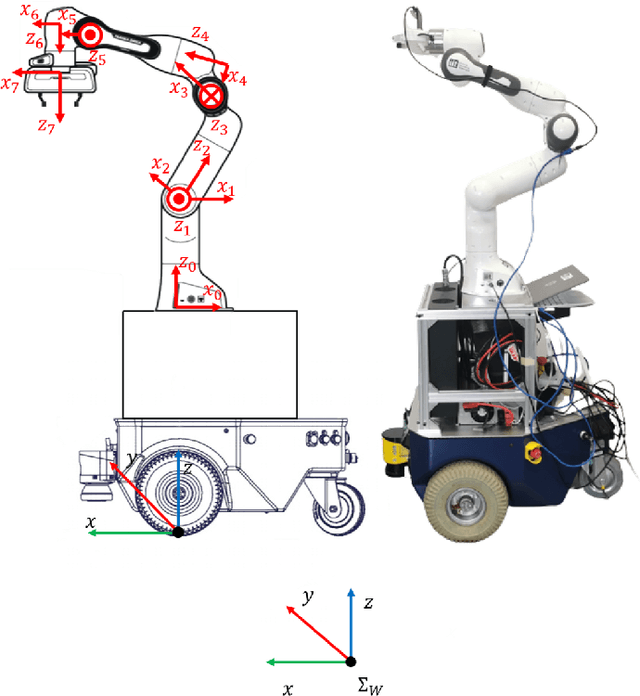
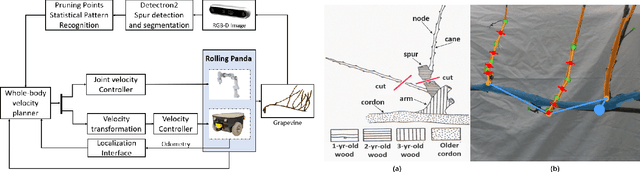
Mobile manipulators that combine mobility and manipulability, are increasingly being used for various unstructured application scenarios in the field, e.g. vineyards. Therefore, the coordinated motion of the mobile base and manipulator is an essential feature of the overall performance. In this paper, we explore a whole-body motion controller of a robot which is composed of a 2-DoFs non-holonomic wheeled mobile base with a 7-DoFs manipulator (non-holonomic wheeled mobile manipulator, NWMM) This robotic platform is designed to efficiently undertake complex grapevine pruning tasks. In the control framework, a task priority coordinated motion of the NWMM is guaranteed. Lower-priority tasks are projected into the null space of the top-priority tasks so that higher-priority tasks are completed without interruption from lower-priority tasks. The proposed controller was evaluated in a grapevine spur pruning experiment scenario.