Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeForce and state-feedback control for robots with non-collocated environmental and actuator forces
Oct 24, 2020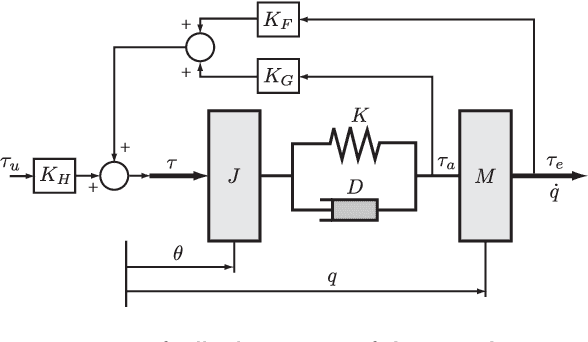
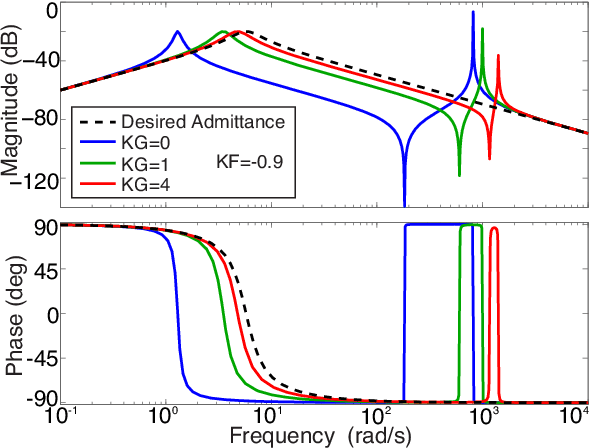
In this paper, we present an impedance control design for multi-variable linear and nonlinear robotic systems. The control design considers force and state feedback to improve the performance of the closed loop. Simultaneous feedback of forces and states allows the controller for an extra degree of freedom to approximate the desired impedance port behaviour. A numerical analysis is used to demonstrate the desired impedance closed-loop behaviour.
Via