 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-time Point Cloud Data Transmission via L4S for 5G-Edge-Assisted Robotics
Nov 11, 2025This article presents a novel framework for real-time Light Detection and Ranging (LiDAR) data transmission that leverages rate-adaptive technologies and point cloud encoding methods to ensure low-latency, and low-loss data streaming. The proposed framework is intended for, but not limited to, robotic applications that require real-time data transmission over the internet for offloaded processing. Specifically, the Low Latency, Low Loss, Scalable Throughput L4S-enabled SCReAM v2 transmission framework is extended to incorporate the Draco geometry compression algorithm, enabling dynamic compression of high-bitrate 3D LiDAR data according to the sensed channel capacity and network load. The low-latency 3D LiDAR streaming system is designed to maintain minimal end-to-end delay while constraining encoding errors to meet the accuracy requirements of robotic applications. We demonstrate the effectiveness of the proposed method through real-world experiments conducted over a public 5G network across multi-kilometer urban environments. The low-latency and low-loss requirements are preserved, while real-time offloading and evaluation of 3D SLAM algorithms are used to validate the framework's performance in practical use cases.
A Hierarchical Graph-Based Terrain-Aware Autonomous Navigation Approach for Complementary Multimodal Ground-Aerial Exploration
May 20, 2025Autonomous navigation in unknown environments is a fundamental challenge in robotics, particularly in coordinating ground and aerial robots to maximize exploration efficiency. This paper presents a novel approach that utilizes a hierarchical graph to represent the environment, encoding both geometric and semantic traversability. The framework enables the robots to compute a shared confidence metric, which helps the ground robot assess terrain and determine when deploying the aerial robot will extend exploration. The robot's confidence in traversing a path is based on factors such as predicted volumetric gain, path traversability, and collision risk. A hierarchy of graphs is used to maintain an efficient representation of traversability and frontier information through multi-resolution maps. Evaluated in a real subterranean exploration scenario, the approach allows the ground robot to autonomously identify zones that are no longer traversable but suitable for aerial deployment. By leveraging this hierarchical structure, the ground robot can selectively share graph information on confidence-assessed frontier targets from parts of the scene, enabling the aerial robot to navigate beyond obstacles and continue exploration.
Deployment of an Aerial Multi-agent System for Automated Task Execution in Large-scale Underground Mining Environments
Jan 17, 2025



In this article, we present a framework for deploying an aerial multi-agent system in large-scale subterranean environments with minimal infrastructure for supporting multi-agent operations. The multi-agent objective is to optimally and reactively allocate and execute inspection tasks in a mine, which are entered by a mine operator on-the-fly. The assignment of currently available tasks to the team of agents is accomplished through an auction-based system, where the agents bid for available tasks, which are used by a central auctioneer to optimally assigns tasks to agents. A mobile Wi-Fi mesh supports inter-agent communication and bi-directional communication between the agents and the task allocator, while the task execution is performed completely infrastructure-free. Given a task to be accomplished, a reliable and modular agent behavior is synthesized by generating behavior trees from a pool of agent capabilities, using a back-chaining approach. The auction system in the proposed framework is reactive and supports addition of new operator-specified tasks on-the-go, at any point through a user-friendly operator interface. The framework has been validated in a real underground mining environment using three aerial agents, with several inspection locations spread in an environment of almost 200 meters. The proposed framework can be utilized for missions involving rapid inspection, gas detection, distributed sensing and mapping etc. in a subterranean environment. The proposed framework and its field deployment contributes towards furthering reliable automation in large-scale subterranean environments to offload both routine and dangerous tasks from human operators to autonomous aerial robots.
A Minimal Subset Approach for Efficient and Scalable Loop Closure
Jan 03, 2025



Loop closure detection in large-scale and long-term missions can be computationally demanding due to the need to identify, verify, and process numerous candidate pairs to establish edge connections for the pose graph optimization. Keyframe sampling mitigates this by reducing the number of frames stored and processed in the back-end system. In this article, we address the gap in optimized keyframe sampling for the combined problem of pose graph optimization and loop closure detection. Our Minimal Subset Approach (MSA) employs an optimization strategy with two key factors, redundancy minimization and information preservation, within a sliding window framework to efficiently reduce redundant keyframes, while preserving essential information. This method delivers comparable performance to baseline approaches, while enhancing scalability and reducing computational overhead. Finally, we evaluate MSA on relevant publicly available datasets, showcasing that it consistently performs across a wide range of environments, without requiring any manual parameter tuning.
Why Sample Space Matters: Keyframe Sampling Optimization for LiDAR-based Place Recognition
Oct 03, 2024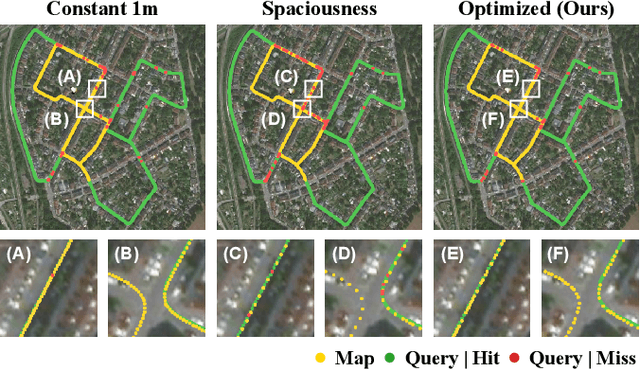
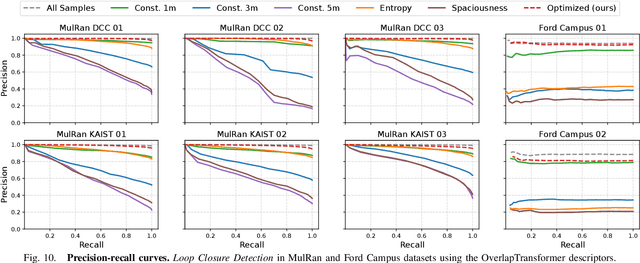
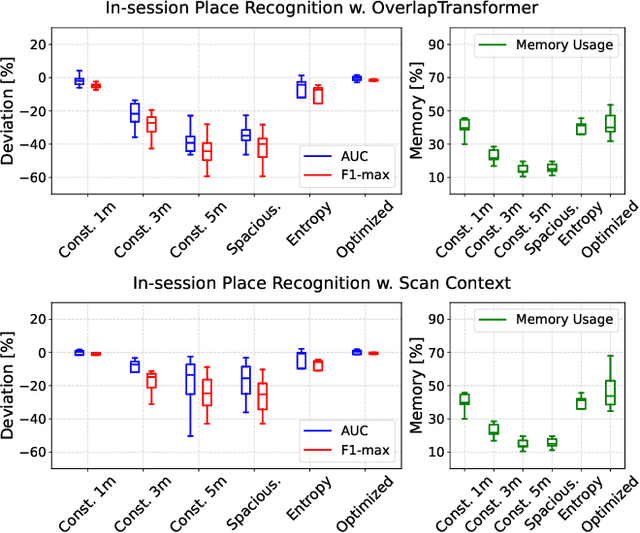
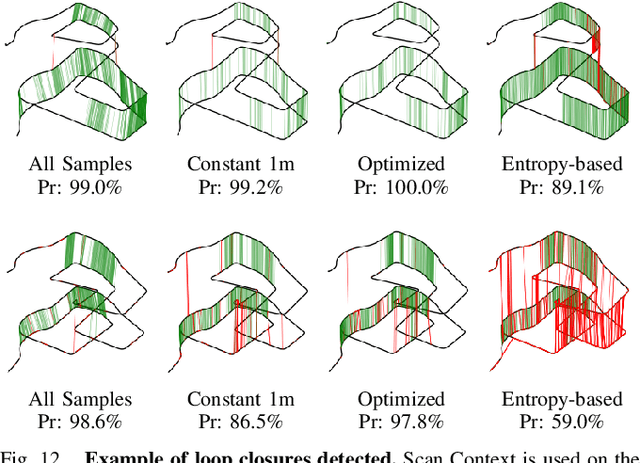
Recent advances in robotics are pushing real-world autonomy, enabling robots to perform long-term and large-scale missions. A crucial component for successful missions is the incorporation of loop closures through place recognition, which effectively mitigates accumulated pose estimation drift. Despite computational advancements, optimizing performance for real-time deployment remains challenging, especially in resource-constrained mobile robots and multi-robot systems since, conventional keyframe sampling practices in place recognition often result in retaining redundant information or overlooking relevant data, as they rely on fixed sampling intervals or work directly in the 3D space instead of the feature space. To address these concerns, we introduce the concept of sample space in place recognition and demonstrate how different sampling techniques affect the query process and overall performance. We then present a novel keyframe sampling approach for LiDAR-based place recognition, which focuses on redundancy minimization and information preservation in the hyper-dimensional descriptor space. This approach is applicable to both learning-based and handcrafted descriptors, and through the experimental validation across multiple datasets and descriptor frameworks, we demonstrate the effectiveness of our proposed method, showing it can jointly minimize redundancy and preserve essential information in real-time. The proposed approach maintains robust performance across various datasets without requiring parameter tuning, contributing to more efficient and reliable place recognition for a wide range of robotic applications.
Leveraging Computation of Expectation Models for Commonsense Affordance Estimation on 3D Scene Graphs
Sep 09, 2024



This article studies the commonsense object affordance concept for enabling close-to-human task planning and task optimization of embodied robotic agents in urban environments. The focus of the object affordance is on reasoning how to effectively identify object's inherent utility during the task execution, which in this work is enabled through the analysis of contextual relations of sparse information of 3D scene graphs. The proposed framework develops a Correlation Information (CECI) model to learn probability distributions using a Graph Convolutional Network, allowing to extract the commonsense affordance for individual members of a semantic class. The overall framework was experimentally validated in a real-world indoor environment, showcasing the ability of the method to level with human commonsense. For a video of the article, showcasing the experimental demonstration, please refer to the following link: https://youtu.be/BDCMVx2GiQE
BOX3D: Lightweight Camera-LiDAR Fusion for 3D Object Detection and Localization
Aug 27, 2024



Object detection and global localization play a crucial role in robotics, spanning across a great spectrum of applications from autonomous cars to multi-layered 3D Scene Graphs for semantic scene understanding. This article proposes BOX3D, a novel multi-modal and lightweight scheme for localizing objects of interest by fusing the information from RGB camera and 3D LiDAR. BOX3D is structured around a three-layered architecture, building up from the local perception of the incoming sequential sensor data to the global perception refinement that covers for outliers and the general consistency of each object's observation. More specifically, the first layer handles the low-level fusion of camera and LiDAR data for initial 3D bounding box extraction. The second layer converts each LiDAR's scan 3D bounding boxes to the world coordinate frame and applies a spatial pairing and merging mechanism to maintain the uniqueness of objects observed from different viewpoints. Finally, BOX3D integrates the third layer that supervises the consistency of the results on the global map iteratively, using a point-to-voxel comparison for identifying all points in the global map that belong to the object. Benchmarking results of the proposed novel architecture are showcased in multiple experimental trials on public state-of-the-art large-scale dataset of urban environments.
FRAME: A Modular Framework for Autonomous Map-merging: Advancements in the Field
Apr 27, 2024



In this article, a novel approach for merging 3D point cloud maps in the context of egocentric multi-robot exploration is presented. Unlike traditional methods, the proposed approach leverages state-of-the-art place recognition and learned descriptors to efficiently detect overlap between maps, eliminating the need for the time-consuming global feature extraction and feature matching process. The estimated overlapping regions are used to calculate a homogeneous rigid transform, which serves as an initial condition for the GICP point cloud registration algorithm to refine the alignment between the maps. The advantages of this approach include faster processing time, improved accuracy, and increased robustness in challenging environments. Furthermore, the effectiveness of the proposed framework is successfully demonstrated through multiple field missions of robot exploration in a variety of different underground environments.
RecNet: An Invertible Point Cloud Encoding through Range Image Embeddings for Multi-Robot Map Sharing and Reconstruction
Feb 03, 2024In the field of resource-constrained robots and the need for effective place recognition in multi-robotic systems, this article introduces RecNet, a novel approach that concurrently addresses both challenges. The core of RecNet's methodology involves a transformative process: it projects 3D point clouds into depth images, compresses them using an encoder-decoder framework, and subsequently reconstructs the range image, seamlessly restoring the original point cloud. Additionally, RecNet utilizes the latent vector extracted from this process for efficient place recognition tasks. This unique approach not only achieves comparable place recognition results but also maintains a compact representation, suitable for seamless sharing among robots to reconstruct their collective maps. The evaluation of RecNet encompasses an array of metrics, including place recognition performance, structural similarity of the reconstructed point clouds, and the bandwidth transmission advantages, derived from sharing only the latent vectors. This reconstructed map paves a groundbreaking way for exploring its usability in navigation, localization, map-merging, and other relevant missions. Our proposed approach is rigorously assessed using both a publicly available dataset and field experiments, confirming its efficacy and potential for real-world applications.
Redundant and Loosely Coupled LiDAR-Wi-Fi Integration for Robust Global Localization in Autonomous Mobile Robotics
Oct 10, 2023



This paper presents a framework addressing the challenge of global localization in autonomous mobile robotics by integrating LiDAR-based descriptors and Wi-Fi fingerprinting in a pre-mapped environment. This is motivated by the increasing demand for reliable localization in complex scenarios, such as urban areas or underground mines, requiring robust systems able to overcome limitations faced by traditional Global Navigation Satellite System (GNSS)-based localization methods. By leveraging the complementary strengths of LiDAR and Wi-Fi sensors used to generate predictions and evaluate the confidence of each prediction as an indicator of potential degradation, we propose a redundancy-based approach that enhances the system's overall robustness and accuracy. The proposed framework allows independent operation of the LiDAR and Wi-Fi sensors, ensuring system redundancy. By combining the predictions while considering their confidence levels, we achieve enhanced and consistent performance in localization tasks.