 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeployment of an Aerial Multi-agent System for Automated Task Execution in Large-scale Underground Mining Environments
Jan 17, 2025



In this article, we present a framework for deploying an aerial multi-agent system in large-scale subterranean environments with minimal infrastructure for supporting multi-agent operations. The multi-agent objective is to optimally and reactively allocate and execute inspection tasks in a mine, which are entered by a mine operator on-the-fly. The assignment of currently available tasks to the team of agents is accomplished through an auction-based system, where the agents bid for available tasks, which are used by a central auctioneer to optimally assigns tasks to agents. A mobile Wi-Fi mesh supports inter-agent communication and bi-directional communication between the agents and the task allocator, while the task execution is performed completely infrastructure-free. Given a task to be accomplished, a reliable and modular agent behavior is synthesized by generating behavior trees from a pool of agent capabilities, using a back-chaining approach. The auction system in the proposed framework is reactive and supports addition of new operator-specified tasks on-the-go, at any point through a user-friendly operator interface. The framework has been validated in a real underground mining environment using three aerial agents, with several inspection locations spread in an environment of almost 200 meters. The proposed framework can be utilized for missions involving rapid inspection, gas detection, distributed sensing and mapping etc. in a subterranean environment. The proposed framework and its field deployment contributes towards furthering reliable automation in large-scale subterranean environments to offload both routine and dangerous tasks from human operators to autonomous aerial robots.
Multimodal Dataset from Harsh Sub-Terranean Environment with Aerosol Particles for Frontier Exploration
Apr 27, 2023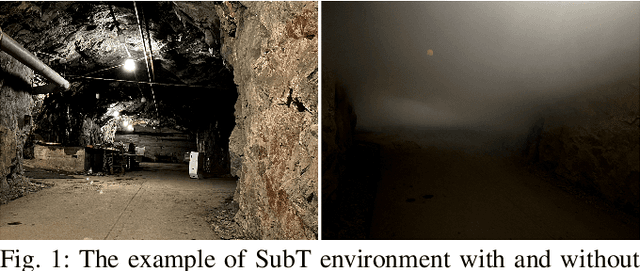
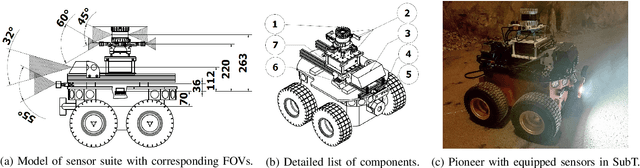
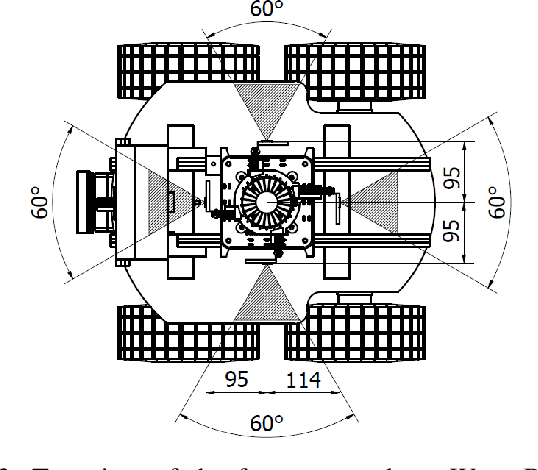
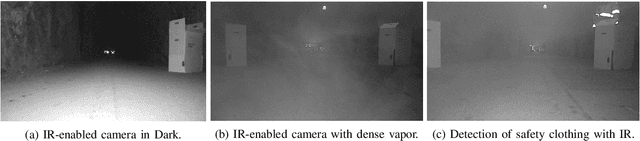
Algorithms for autonomous navigation in environments without Global Navigation Satellite System (GNSS) coverage mainly rely on onboard perception systems. These systems commonly incorporate sensors like cameras and LiDARs, the performance of which may degrade in the presence of aerosol particles. Thus, there is a need of fusing acquired data from these sensors with data from RADARs which can penetrate through such particles. Overall, this will improve the performance of localization and collision avoidance algorithms under such environmental conditions. This paper introduces a multimodal dataset from the harsh and unstructured underground environment with aerosol particles. A detailed description of the onboard sensors and the environment, where the dataset is collected are presented to enable full evaluation of acquired data. Furthermore, the dataset contains synchronized raw data measurements from all onboard sensors in Robot Operating System (ROS) format to facilitate the evaluation of navigation, and localization algorithms in such environments. In contrast to the existing datasets, the focus of this paper is not only to capture both temporal and spatial data diversities but also to present the impact of harsh conditions on captured data. Therefore, to validate the dataset, a preliminary comparison of odometry from onboard LiDARs is presented.
Reactive Task Allocation for Balanced Servicing of Multiple Task Queues
Apr 05, 2023



In this article, we propose a reactive task allocation architecture for a multi-agent system for scenarios where the tasks arrive at random times and are grouped into multiple queues. Two stage tasks are considered where every task has a beginning, an intermediate and a final part, typical in pick-and-drop and inspect-and-report scenarios. A centralized auction-based task allocation system is proposed, where an auction system takes into consideration bids submitted by the agents for individual tasks, current length of the queues and the waiting times of the tasks in the queues to decide on a task allocation strategy. The costs associated with these considerations, along with the constraints of having unique mappings between tasks and agents and constraints on the maximum number of agents that can be assigned to a queue, results in a Linear Integer Program (LIP) that is solved using the SCIP solver. For the scenario where the queue lengths are penalized but not the waiting times, we demonstrate that the auction system allocates tasks in a manner that all the queue lengths become constant, which is termed balancing. For the scenarios where both the costs are considered, we qualitatively analyse the effect of the choice of the relative weights on the resulting task allocation and provide guidelines for the choice of the weights. We present simulation results that illustrate the balanced allocation of tasks and validate the analysis for the trade-off between the costs related to queue lengths and task waiting times.
Reactive Multi-agent Coordination using Auction-based Task Allocation and Behavior Trees
Apr 04, 2023



This article presents an architecture for multi-agent task allocation and task execution, through the unification of a market-inspired task-auctioning system with Behavior Trees for managing and executing lower level behaviors. We consider the scenario with multi-stage tasks, such as 'pick and place', whose arrival times are not known a priori. In such a scenario, a coordinating architecture is expected to be reactive to newly arrived tasks and the resulting rerouting of agents should be dependent on the stage of completion of their current multi-stage tasks. In the novel architecture proposed in this article, a central auctioning system gathers bids (cost-estimates for completing currently available tasks) from all agents, and solves a combinatorial problem to optimally assign tasks to agents. For every agent, it's participation in the auctioning system and execution of an assigned multi-stage task is managed using behavior trees, which switch among several well-defined behaviors in response to changing scenarios. The auctioning system is run at a fixed rate, allowing for newly added tasks to be incorporated into the auctioning system, which makes the solution reactive and allows for the rerouting of some agents (subject to the states of the behavior trees). We demonstrate that the proposed architecture is especially well-suited for multi-stage tasks, where high costs are incurred when rerouting agents who have completed one or more stages of their current tasks. The scalability analysis of the proposed architecture reveals that it scales well with the number of agents and number of tasks. The proposed framework is experimentally validated in multiple scenarios in a lab environment. A video of a demonstration can be viewed at: https://youtu.be/ZdEkoOOlB2g}.