 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHow IMU Drift Influences Multi-Radar Inertial Odometry for Ground Robots in Subterranean Terrains
Feb 27, 2026Reliable radar inertial odometry (RIO) requires mitigating IMU bias drift, a challenge that intensifies in subterranean environments due to extreme temperatures and gravity-induced accelerations. Cost-effective IMUs such as the Pixhawk, when paired with FMCW TI IWR6843AOP EVM radars, suffer from drift-induced degradation compounded by sparse, noisy, and flickering radar returns, making fusion less stable than LiDAR-based odometry. Yet, LiDAR fails under smoke, dust, and aerosols, whereas FMCW radars remain compact, lightweight, cost-effective, and robust in these situations. To address these challenges, we propose a two-stage MRIO framework that combines an IMU bias estimator for resilient localization and mapping in GPS-denied subterranean environments affected by smoke. Radar-based ego-velocity estimation is formulated through a least-squares approach and incorporated into an EKF for online IMU bias correction; the corrected IMU accelerations are fused with heterogeneous measurements from multiple radars and an IMU to refine odometry. The proposed framework further supports radar-only mapping by exploiting the robot's estimated translational and rotational displacements. In subterranean field trials, MRIO delivers robust localization and mapping, outperforming EKF-RIO. It maintains accuracy across cost-efficient FMCW radar setups and different IMUs, showing resilience with Pixhawk and higher-grade units such as VectorNav. The implementation will be provided as an open-source resource to the community (code available at https://github.com/LTU-RAI/MRIO
Planetary Terrain Datasets and Benchmarks for Rover Path Planning
Dec 24, 2025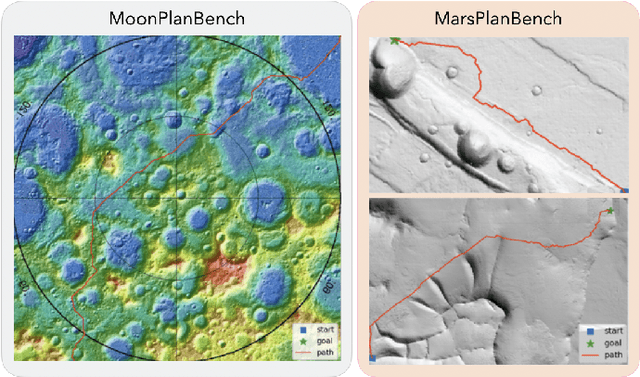
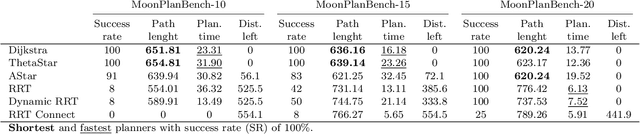
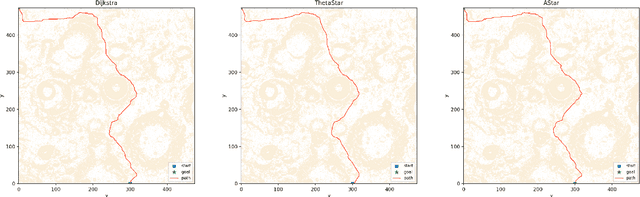
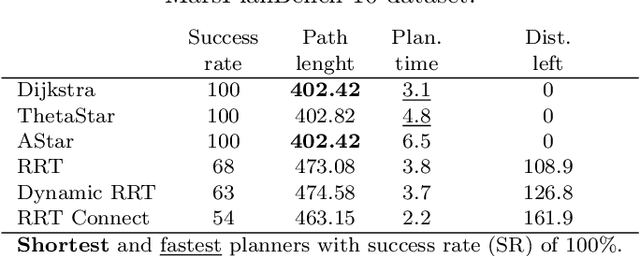
Planetary rover exploration is attracting renewed interest with several upcoming space missions to the Moon and Mars. However, a substantial amount of data from prior missions remain underutilized for path planning and autonomous navigation research. As a result, there is a lack of space mission-based planetary datasets, standardized benchmarks, and evaluation protocols. In this paper, we take a step towards coordinating these three research directions in the context of planetary rover path planning. We propose the first two large planar benchmark datasets, MarsPlanBench and MoonPlanBench, derived from high-resolution digital terrain images of Mars and the Moon. In addition, we set up classical and learned path planning algorithms, in a unified framework, and evaluate them on our proposed datasets and on a popular planning benchmark. Through comprehensive experiments, we report new insights on the performance of representative path planning algorithms on planetary terrains, for the first time to the best of our knowledge. Our results show that classical algorithms can achieve up to 100% global path planning success rates on average across challenging terrains such as Moon's north and south poles. This suggests, for instance, why these algorithms are used in practice by NASA. Conversely, learning-based models, although showing promising results in less complex environments, still struggle to generalize to planetary domains. To serve as a starting point for fundamental path planning research, our code and datasets will be released at: https://github.com/mchancan/PlanetaryPathBench.
Toward Fully Autonomous Flexible Chunk-Based Aerial Additive Manufacturing: Insights from Experimental Validation
Feb 27, 2025A novel autonomous chunk-based aerial additive manufacturing framework is presented, supported with experimental demonstration advancing aerial 3D printing. An optimization-based decomposition algorithm transforms structures into sub-components, or chunks, treated as individual tasks coordinated via a dependency graph, ensuring sequential assignment to UAVs considering inter-dependencies and printability constraints for seamless execution. A specially designed hexacopter equipped with a pressurized canister for lightweight expandable foam extrusion is utilized to deposit the material in a controlled manner. To further enhance precise execution of the printing, an offset-free Model Predictive Control mechanism is considered compensating reactively for disturbances and ground effect during execution. Additionally, an interlocking mechanism is introduced in the chunking process to enhance structural cohesion and improve layer adhesion. Extensive experiments demonstrate the framework's effectiveness in constructing precise structures of various shapes while seamlessly adapting to practical challenges, proving its potential for a transformative leap in aerial robotic capability for autonomous construction.
On Experimental Emulation of Printability and Fleet Aware Generic Mesh Decomposition for Enabling Aerial 3D Printing
Feb 08, 2024This article introduces an experimental emulation of a novel chunk-based flexible multi-DoF aerial 3D printing framework. The experimental demonstration of the overall autonomy focuses on precise motion planning and task allocation for a UAV, traversing through a series of planned space-filling paths involved in the aerial 3D printing process without physically depositing the overlaying material. The flexible multi-DoF aerial 3D printing is a newly developed framework and has the potential to strategically distribute the envisioned 3D model to be printed into small, manageable chunks suitable for distributed 3D printing. Moreover, by harnessing the dexterous flexibility due to the 6 DoF motion of UAV, the framework enables the provision of integrating the overall autonomy stack, potentially opening up an entirely new frontier in additive manufacturing. However, it's essential to note that the feasibility of this pioneering concept is still in its very early stage of development, which yet needs to be experimentally verified. Towards this direction, experimental emulation serves as the crucial stepping stone, providing a pseudo mockup scenario by virtual material deposition, helping to identify technological gaps from simulation to reality. Experimental emulation results, supported by critical analysis and discussion, lay the foundation for addressing the technological and research challenges to significantly push the boundaries of the state-of-the-art 3D printing mechanism.
Flexible Multi-DoF Aerial 3D Printing Supported with Automated Optimal Chunking
Aug 22, 2023The future of 3D printing utilizing unmanned aerial vehicles (UAVs) presents a promising capability to revolutionize manufacturing and to enable the creation of large-scale structures in remote and hard- to-reach areas e.g. in other planetary systems. Nevertheless, the limited payload capacity of UAVs and the complexity in the 3D printing of large objects pose significant challenges. In this article we propose a novel chunk-based framework for distributed 3D printing using UAVs that sets the basis for a fully collaborative aerial 3D printing of challenging structures. The presented framework, through a novel proposed optimisation process, is able to divide the 3D model to be printed into small, manageable chunks and to assign them to a UAV for partial printing of the assigned chunk, in a fully autonomous approach. Thus, we establish the algorithms for chunk division, allocation, and printing, and we also introduce a novel algorithm that efficiently partitions the mesh into planar chunks, while accounting for the inter-connectivity constraints of the chunks. The efficiency of the proposed framework is demonstrated through multiple physics based simulations in Gazebo, where a CAD construction mesh is printed via multiple UAVs carrying materials whose volume is proportionate to a fraction of the total mesh volume.
Safe Autonomous Docking Maneuvers for a Floating Platform based on Input Sharing Control Barrier Functions
Sep 14, 2022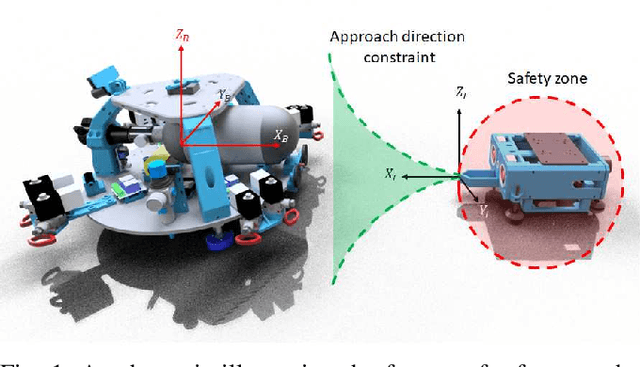
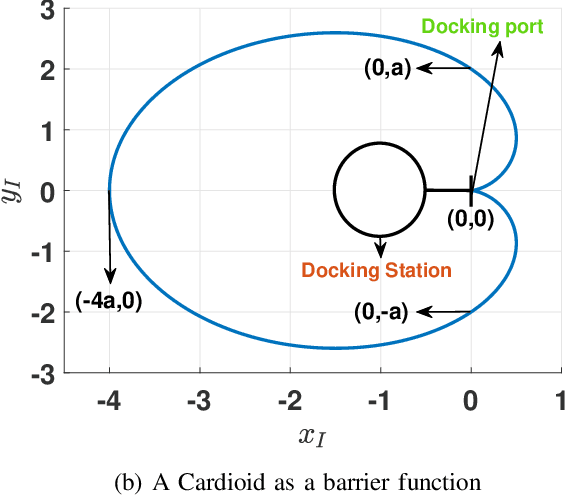
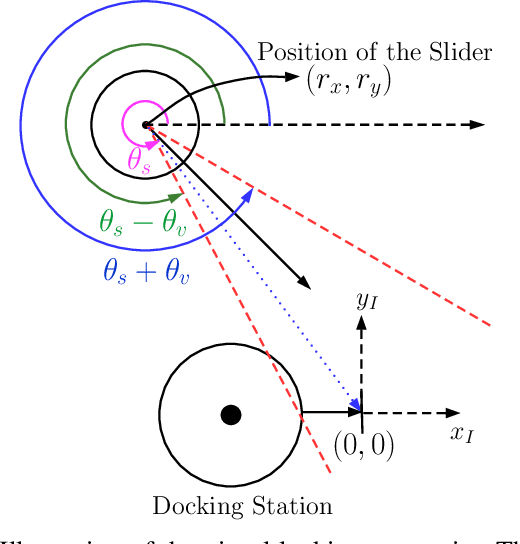
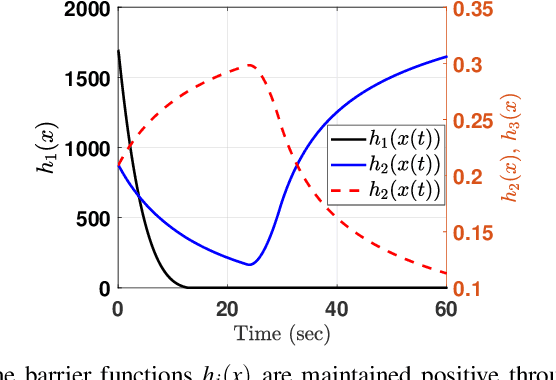
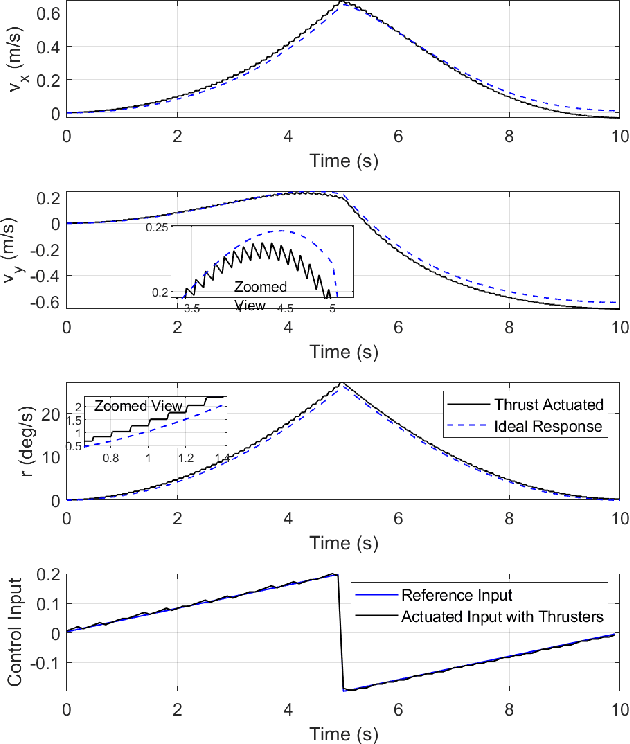
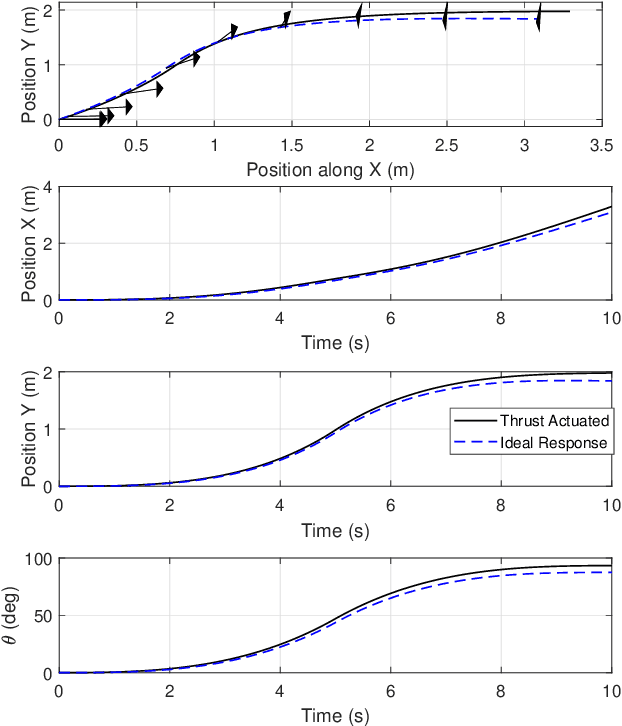
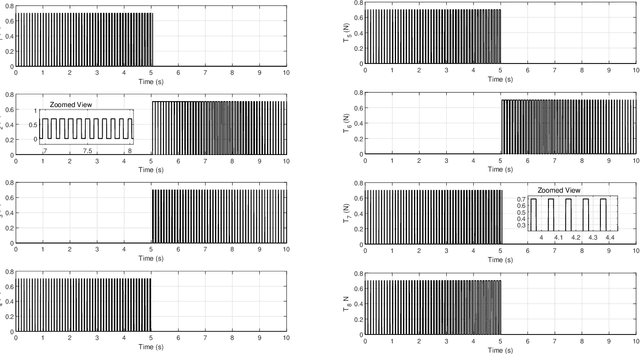
In this article, we present a control strategy for the problem of safe autonomous docking for a planar floating platform (Slider) that emulates the movement of a satellite. Employing the proposed strategy, Slider approaches a docking port with the right orientation, maintaining a safe distance, while always keeping a visual lock on the docking port throughout the docking maneuver. Control barrier functions are designed to impose the safety, direction of approach and visual locking constraints. Three control inputs of the Slider are shared among three barrier functions in enforcing the constraints. It is proved that the control inputs are shared in a conflict-free manner in rendering the sets defining safety and visual locking constraints forward invariant and in establishing finite-time convergence to the visual locking mode. The conflict-free input-sharing ensures the feasibility of a quadratic program that generates minimally-invasive corrections for a nominal controller, that is designed to track the docking port, so that the barrier constraints are respected throughout the docking maneuver. The efficacy of the proposed control design approach is validated through various simulations.
Design and Model Predictive Control of Mars Coaxial Quadrotor
Oct 01, 2021
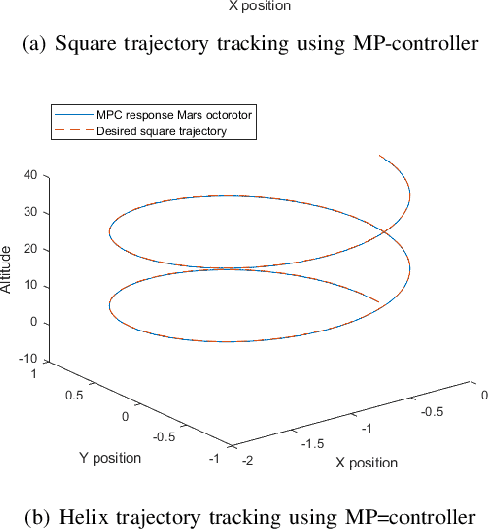
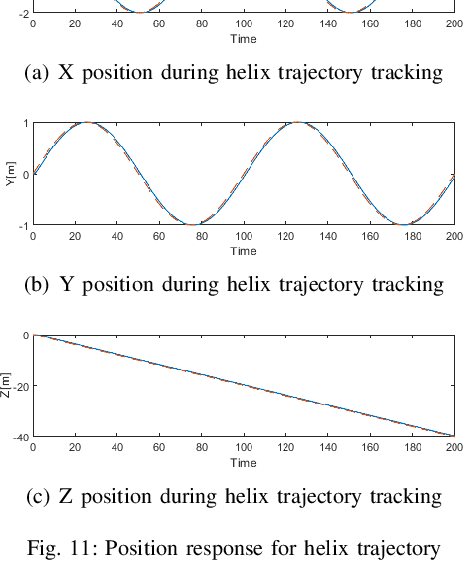
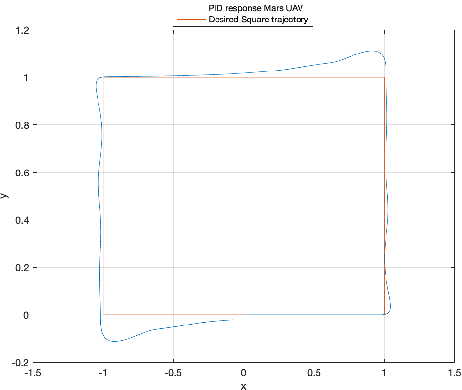
Mars has been a prime candidate for planetary exploration of the solar system because of the science discoveries that support chances of future habitation on this planet. Martian caves and lava tubes like terrains, which consists of uneven ground, poor visibility and confined space, makes it impossible for wheel based rovers to navigate through these areas. In order to address these limitations and advance the exploration capability in a Martian terrain, this article presents the design and control of a novel coaxial quadrotor Micro Aerial Vehicle (MAV). As it will be presented, the key contributions on the design and control architecture of the proposed Mars coaxial quadrotor, are introducing an alternative and more enhanced, from a control point of view concept, when compared in terms of autonomy to Ingenuity. Based on the presented design, the article will introduce the mathematical modelling and automatic control framework of the vehicle that will consist of a linearised model of a co-axial quadrotor and a corresponding Model Predictive Controller (MPC) for the trajectory tracking. Among the many models, proposed for the aerial flight on Mars, a reliable control architecture lacks in the related state of the art. The MPC based closed loop responses of the proposed MAV will be verified in different conditions during the flight with additional disturbances, induced to replicate a real flight scenario. In order to further validate the proposed control architecture and prove the efficacy of the suggested design, the introduced Mars coaxial quadrotor and the MPC scheme will be compared to a PID-type controller, similar to the Ingenuity helicopter's control architecture for the position and the heading.
Slider: On the Design and Modeling of a 2D Floating Satellite Platform
Jan 16, 2021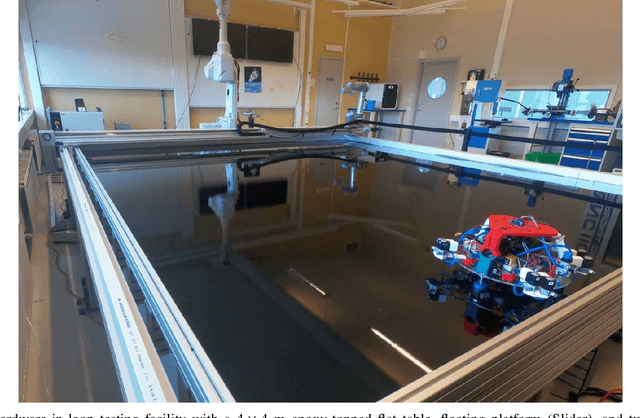
In this article, a floating robotic emulation platform for a virtual demonstration of satellite motion in space is presented. The robotic platform design is characterized by its friction-less, levitating, yet planar motion over a hyper-smooth surface. The robotic platform, integrated with sensor and actuator units, is fully designed and manufactured from the Robotics and Artificial Intelligence Team at Lule\aa\ University of Technology. A detailed design description along with the mathematical modeling describing the platform's dynamic motion is formulated. Finally, the proposed design is validated in extensive simulation studies, while the overall test bed experimental setup, as well as the vehicle hardware and software architectures, are discussed in detail. Furthermore, the entire design, including 3D printing CAD model and different testbed elements, is provided in an open-source repository and a test campaign is used to showcase its capabilities and illustrate its operations.