 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSlider: On the Design and Modeling of a 2D Floating Satellite Platform
Paper and Code
Jan 16, 2021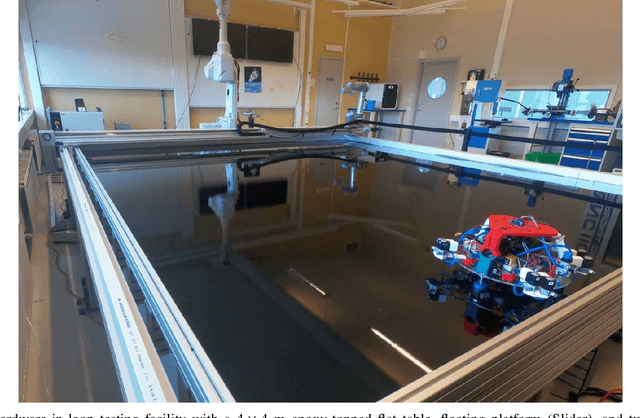
In this article, a floating robotic emulation platform for a virtual demonstration of satellite motion in space is presented. The robotic platform design is characterized by its friction-less, levitating, yet planar motion over a hyper-smooth surface. The robotic platform, integrated with sensor and actuator units, is fully designed and manufactured from the Robotics and Artificial Intelligence Team at Lule\aa\ University of Technology. A detailed design description along with the mathematical modeling describing the platform's dynamic motion is formulated. Finally, the proposed design is validated in extensive simulation studies, while the overall test bed experimental setup, as well as the vehicle hardware and software architectures, are discussed in detail. Furthermore, the entire design, including 3D printing CAD model and different testbed elements, is provided in an open-source repository and a test campaign is used to showcase its capabilities and illustrate its operations.