 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeToward Fully Autonomous Flexible Chunk-Based Aerial Additive Manufacturing: Insights from Experimental Validation
Feb 27, 2025A novel autonomous chunk-based aerial additive manufacturing framework is presented, supported with experimental demonstration advancing aerial 3D printing. An optimization-based decomposition algorithm transforms structures into sub-components, or chunks, treated as individual tasks coordinated via a dependency graph, ensuring sequential assignment to UAVs considering inter-dependencies and printability constraints for seamless execution. A specially designed hexacopter equipped with a pressurized canister for lightweight expandable foam extrusion is utilized to deposit the material in a controlled manner. To further enhance precise execution of the printing, an offset-free Model Predictive Control mechanism is considered compensating reactively for disturbances and ground effect during execution. Additionally, an interlocking mechanism is introduced in the chunking process to enhance structural cohesion and improve layer adhesion. Extensive experiments demonstrate the framework's effectiveness in constructing precise structures of various shapes while seamlessly adapting to practical challenges, proving its potential for a transformative leap in aerial robotic capability for autonomous construction.
Soft Arm-Motor Thrust Characterization for a Pneumatically Actuated Soft Morphing Quadrotor
Feb 18, 2025In this work, an experimental characterization of the configuration space of a soft, pneumatically actuated morphing quadrotor is presented, with a focus on precise thrust characterization of its flexible arms, considering the effect of downwash. Unlike traditional quadrotors, the soft drone has pneumatically actuated arms, introducing complex, nonlinear interactions between motor thrust and arm deformation, which make precise control challenging. The silicone arms are actuated using differential pressure to achieve flexibility and thus have a variable workspace compared to their fixed counter-parts. The deflection of the soft arms during compression and expansion is controlled throughout the flight. However, in real time, the downwash from the motor attached at the tip of the soft arm generates a significant and random disturbance on the arm. This disturbance affects both the desired deflection of the arm and the overall stability of the system. To address this factor, an experimental characterization of the effect of downwash on the deflection angle of the arm is conducted.
Slider: On the Design and Modeling of a 2D Floating Satellite Platform
Jan 16, 2021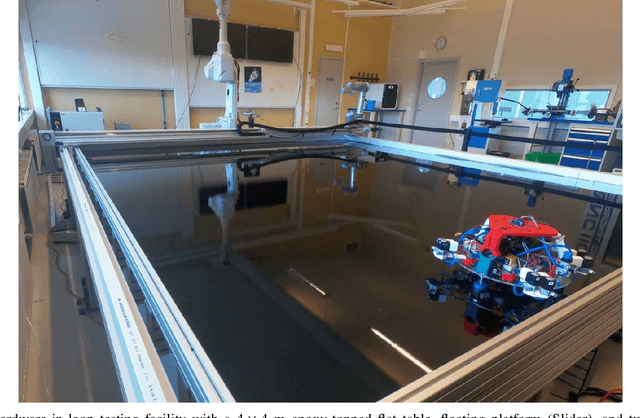
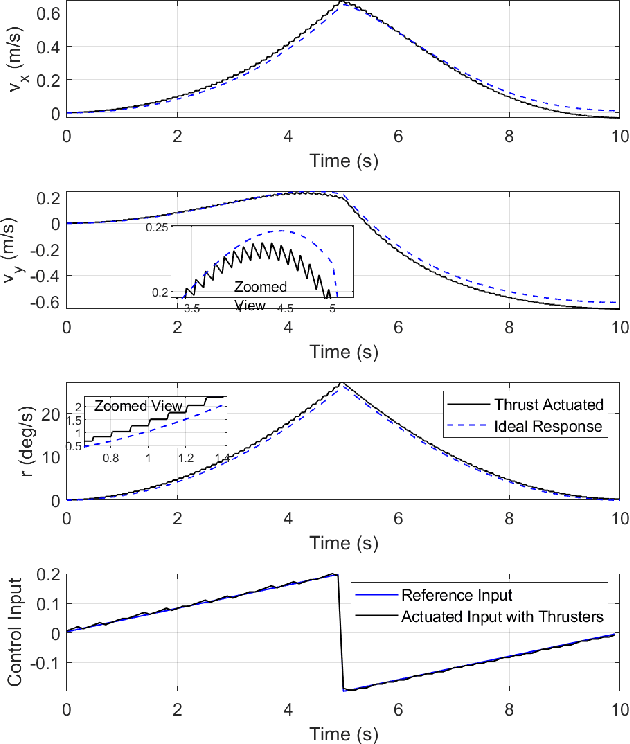
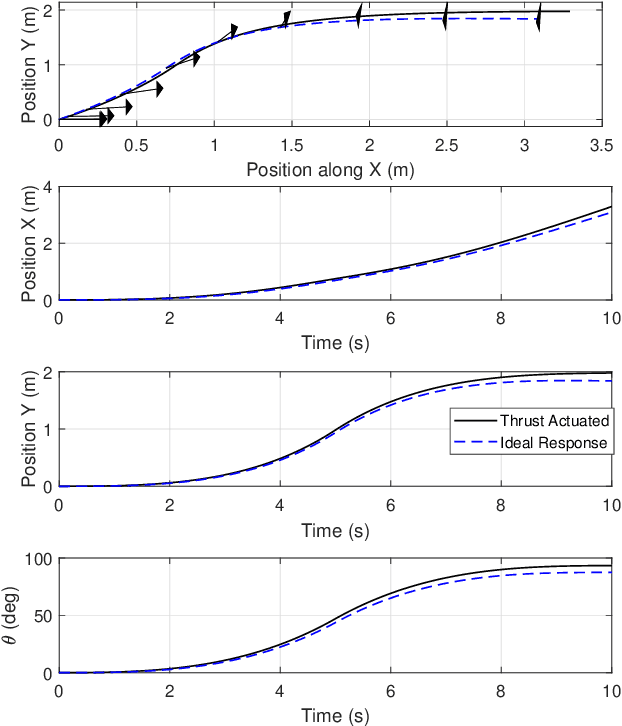
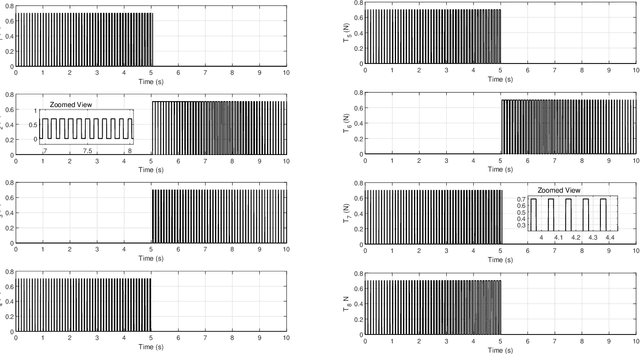
In this article, a floating robotic emulation platform for a virtual demonstration of satellite motion in space is presented. The robotic platform design is characterized by its friction-less, levitating, yet planar motion over a hyper-smooth surface. The robotic platform, integrated with sensor and actuator units, is fully designed and manufactured from the Robotics and Artificial Intelligence Team at Lule\aa\ University of Technology. A detailed design description along with the mathematical modeling describing the platform's dynamic motion is formulated. Finally, the proposed design is validated in extensive simulation studies, while the overall test bed experimental setup, as well as the vehicle hardware and software architectures, are discussed in detail. Furthermore, the entire design, including 3D printing CAD model and different testbed elements, is provided in an open-source repository and a test campaign is used to showcase its capabilities and illustrate its operations.
A Subterranean Virtual Cave World for Gazebo based on the DARPA SubT Challenge
Apr 21, 2020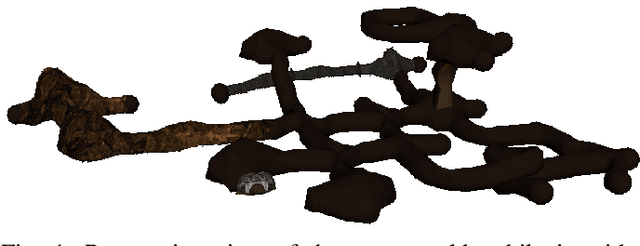
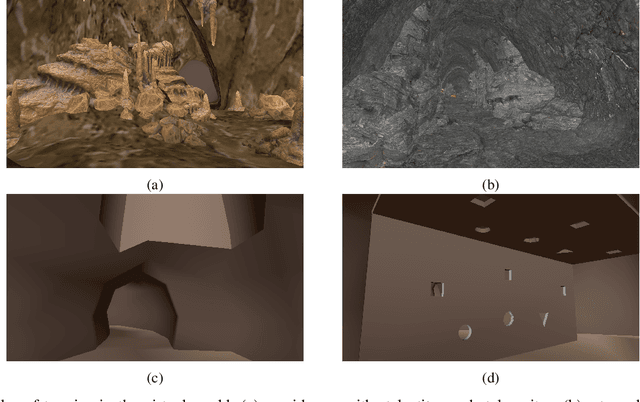
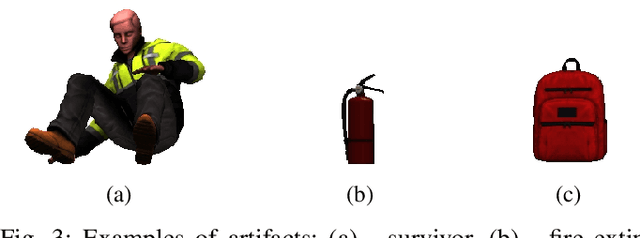
Subterranean environments with lots of obstacles, including narrow passages, large voids, rock falls and absence of illumination were always challenging for control, navigation, and perception of mobile robots. The limited availability and access to such environments restricts the development pace of capabilities for robotic platforms to autonomously accomplish tasks in such challenging areas. The Subterranean Challenge is a competition focusing on bringing robotic exploration a step closer to real life applications for man-made underground tunnels, urban areas and natural cave networks, envisioning advanced assistance tools for first responders and disaster relief agencies. The challenge offers a software-based virtual part to showcase technologies in autonomy perception, networking and mobility for such areas. Thus, the presented open-source virtual world aims to become a test-bed for evaluating the developed algorithms and software and to foster mobile robotics developments.