 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Subterranean Virtual Cave World for Gazebo based on the DARPA SubT Challenge
Apr 21, 2020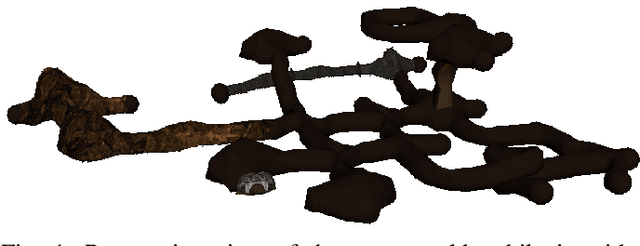
Subterranean environments with lots of obstacles, including narrow passages, large voids, rock falls and absence of illumination were always challenging for control, navigation, and perception of mobile robots. The limited availability and access to such environments restricts the development pace of capabilities for robotic platforms to autonomously accomplish tasks in such challenging areas. The Subterranean Challenge is a competition focusing on bringing robotic exploration a step closer to real life applications for man-made underground tunnels, urban areas and natural cave networks, envisioning advanced assistance tools for first responders and disaster relief agencies. The challenge offers a software-based virtual part to showcase technologies in autonomy perception, networking and mobility for such areas. Thus, the presented open-source virtual world aims to become a test-bed for evaluating the developed algorithms and software and to foster mobile robotics developments.