 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSlider: On the Design and Modeling of a 2D Floating Satellite Platform
Jan 16, 2021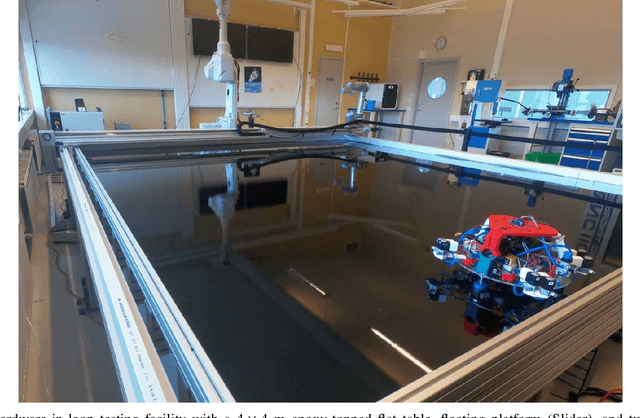
In this article, a floating robotic emulation platform for a virtual demonstration of satellite motion in space is presented. The robotic platform design is characterized by its friction-less, levitating, yet planar motion over a hyper-smooth surface. The robotic platform, integrated with sensor and actuator units, is fully designed and manufactured from the Robotics and Artificial Intelligence Team at Lule\aa\ University of Technology. A detailed design description along with the mathematical modeling describing the platform's dynamic motion is formulated. Finally, the proposed design is validated in extensive simulation studies, while the overall test bed experimental setup, as well as the vehicle hardware and software architectures, are discussed in detail. Furthermore, the entire design, including 3D printing CAD model and different testbed elements, is provided in an open-source repository and a test campaign is used to showcase its capabilities and illustrate its operations.
Subterranean MAV Navigation based on Nonlinear MPC with Collision Avoidance Constraints
Jun 07, 2020
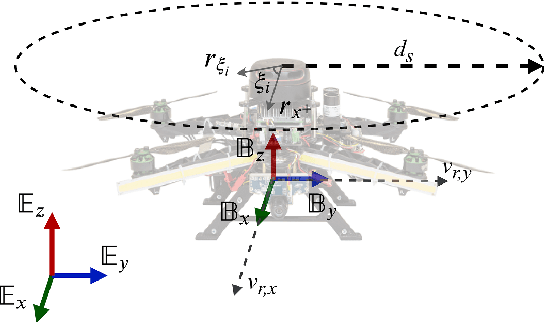

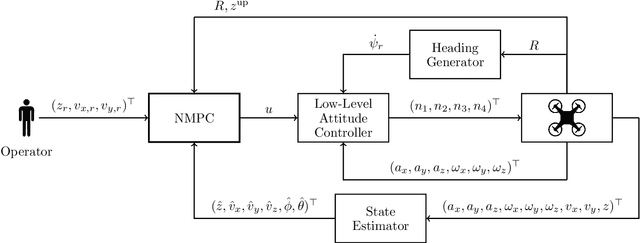
Micro Aerial Vehicles (MAVs) navigation in subterranean environments is gaining attention in the field of aerial robotics, however there are still multiple challenges for collision free navigation in such harsh environments. This article proposes a novel baseline solution for collision free navigation with Nonlinear Model Predictive Control (NMPC). In the proposed method, the MAV is considered as a floating object, where the velocities on the $x$, $y$ axes and the position on altitude are the references for the NMPC to navigate along the tunnel, while the NMPC avoids the collision by considering kinematics of the obstacles based on measurements from a 2D lidar. Moreover, a novel approach for correcting the heading of the MAV towards the center of the mine tunnel is proposed, while the efficacy of the suggested framework has been evaluated in multiple field trials in an underground mine in Sweden.
MAV Navigation in Unknown Dark Underground Mines Using Deep Learning
Jun 07, 2020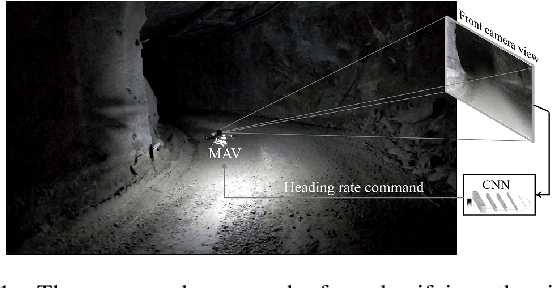
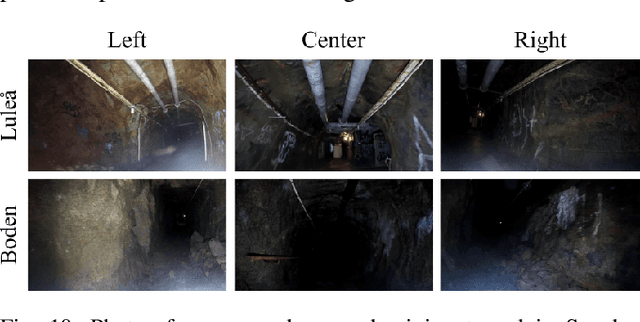
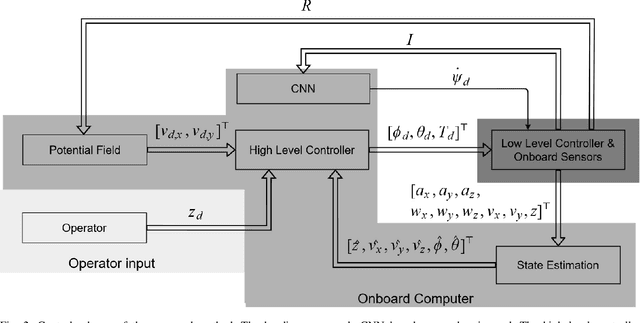
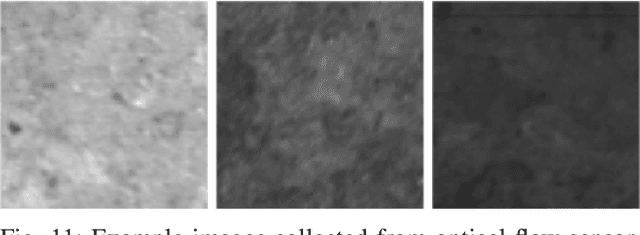
This article proposes a Deep Learning (DL) method to enable fully autonomous flights for low-cost Micro Aerial Vehicles (MAVs) in unknown dark underground mine tunnels. This kind of environments pose multiple challenges including lack of illumination, narrow passages, wind gusts and dust. The proposed method does not require accurate pose estimation and considers the flying platform as a floating object. The Convolutional Neural Network (CNN) supervised image classifier method corrects the heading of the MAV towards the center of the mine tunnel by processing the image frames from a single on-board camera, while the platform navigates at constant altitude and desired velocity references. Moreover, the output of the CNN module can be used from the operator as means of collision prediction information. The efficiency of the proposed method has been successfully experimentally evaluated in multiple field trials in an underground mine in Sweden, demonstrating the capability of the proposed method in different areas and illumination levels.
MAV Development Towards Navigation in Unknown and Dark Mining Tunnels
May 29, 2020
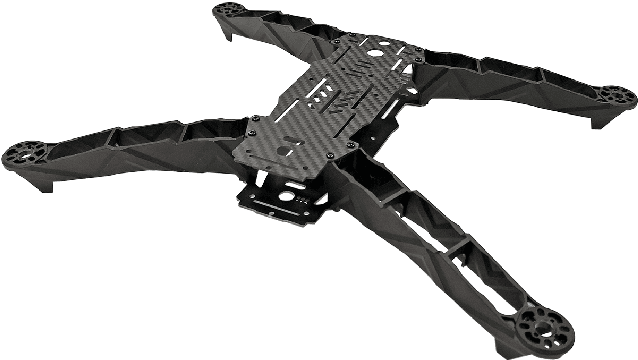
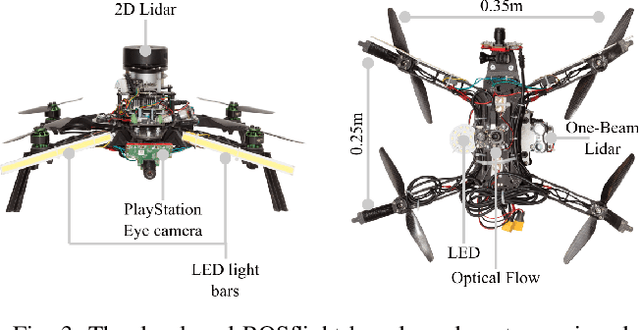
The Mining industry considers the deployment of MAV for autonomous inspection of tunnels and shafts to increase safety and productivity. However, mines are challenging and harsh environments that have a direct effect on the degradation of high-end and expensive utilized components over time. Inspired by this effect, this article presents a low cost and modular platform for designing a fully autonomous navigating MAV without requiring any prior information from the surrounding environment. The design of the proposed aerial vehicle can be considered as a consumable platform that can be instantly replaced in case of damage or defect, thus comes into agreement with the vision of mining companies for utilizing stable aerial robots with reasonable cost. In the proposed design, the operator has access to all on-board data, thus increasing the overall customization of the design and the execution of the mine inspection mission. The MAV platform has a software core based on ROS operating on an Aaeon UP-Board, while it is equipped with a sensor suite to accomplish the autonomous navigation equally reliable when compared to high-end and expensive platforms.
Autonomous visual inspection of large-scale infrastructures using aerial robots
Jan 16, 2019

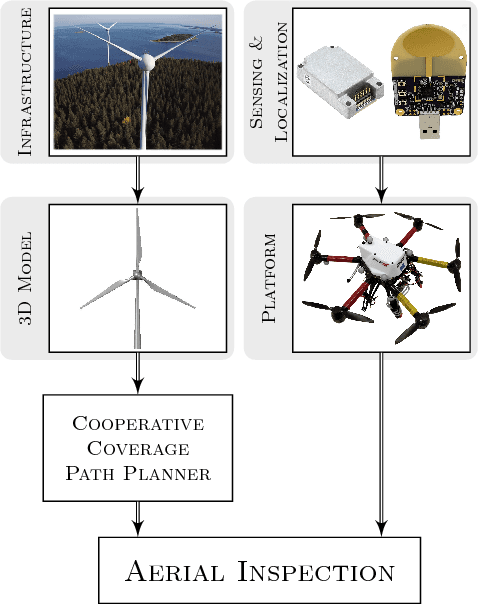

This article presents a novel framework for performing visual inspection around 3D infrastructures, by establishing a team of fully autonomous Micro Aerial Vehicles (MAVs) with robust localization, planning and perception capabilities. The proposed aerial inspection system reaches high level of autonomy on a large scale, while pushing to the boundaries the real life deployment of aerial robotics. In the presented approach, the MAVs deployed for the inspection of the structure rely only on their onboard computer and sensory systems. The developed framework envisions a modular system, combining open research challenges in the fields of localization, path planning and mapping, with an overall capability for a fast on site deployment and a reduced execution time that can repeatably perform the inspection mission according to the operator needs. The architecture of the established system includes: 1) a geometry-based path planner for coverage of complex structures by multiple MAVs, 2) an accurate yet flexible localization component, which provides an accurate pose estimation for the MAVs by utilizing an Ultra Wideband fused inertial estimation scheme, and 3) visual data post-processing scheme for the 3D model building. The performance of the proposed framework has been experimentally demonstrated in multiple realistic outdoor field trials, all focusing on the challenging structure of a wind turbine as the main test case. The successful experimental results, depict the merits of the proposed autonomous navigation system as the enabling technology towards aerial robotic inspectors.