 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSubterranean MAV Navigation based on Nonlinear MPC with Collision Avoidance Constraints
Jun 07, 2020

Micro Aerial Vehicles (MAVs) navigation in subterranean environments is gaining attention in the field of aerial robotics, however there are still multiple challenges for collision free navigation in such harsh environments. This article proposes a novel baseline solution for collision free navigation with Nonlinear Model Predictive Control (NMPC). In the proposed method, the MAV is considered as a floating object, where the velocities on the $x$, $y$ axes and the position on altitude are the references for the NMPC to navigate along the tunnel, while the NMPC avoids the collision by considering kinematics of the obstacles based on measurements from a 2D lidar. Moreover, a novel approach for correcting the heading of the MAV towards the center of the mine tunnel is proposed, while the efficacy of the suggested framework has been evaluated in multiple field trials in an underground mine in Sweden.
Autonomous visual inspection of large-scale infrastructures using aerial robots
Jan 16, 2019


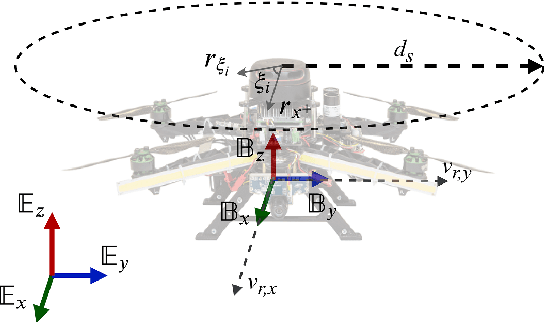
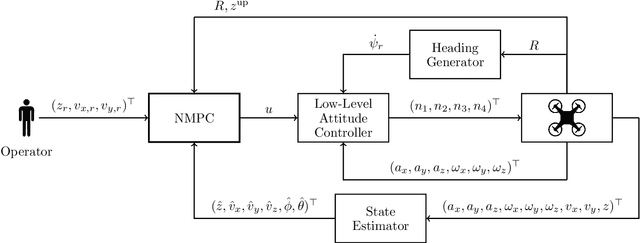
This article presents a novel framework for performing visual inspection around 3D infrastructures, by establishing a team of fully autonomous Micro Aerial Vehicles (MAVs) with robust localization, planning and perception capabilities. The proposed aerial inspection system reaches high level of autonomy on a large scale, while pushing to the boundaries the real life deployment of aerial robotics. In the presented approach, the MAVs deployed for the inspection of the structure rely only on their onboard computer and sensory systems. The developed framework envisions a modular system, combining open research challenges in the fields of localization, path planning and mapping, with an overall capability for a fast on site deployment and a reduced execution time that can repeatably perform the inspection mission according to the operator needs. The architecture of the established system includes: 1) a geometry-based path planner for coverage of complex structures by multiple MAVs, 2) an accurate yet flexible localization component, which provides an accurate pose estimation for the MAVs by utilizing an Ultra Wideband fused inertial estimation scheme, and 3) visual data post-processing scheme for the 3D model building. The performance of the proposed framework has been experimentally demonstrated in multiple realistic outdoor field trials, all focusing on the challenging structure of a wind turbine as the main test case. The successful experimental results, depict the merits of the proposed autonomous navigation system as the enabling technology towards aerial robotic inspectors.
Cooperative Aerial Coverage Path Planning for Visual Inspection of Complex Infrastructures
Dec 05, 2016
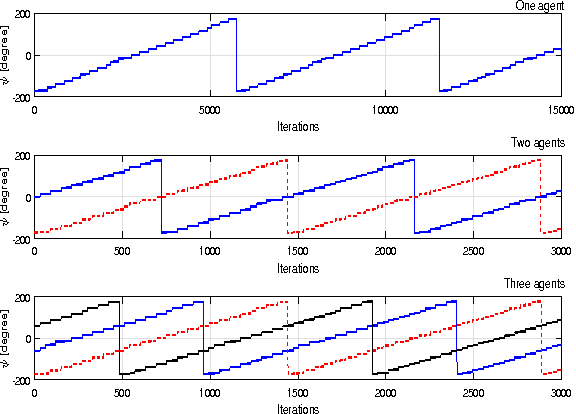
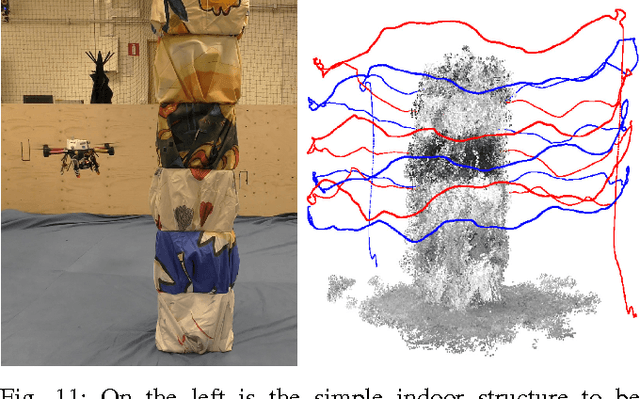
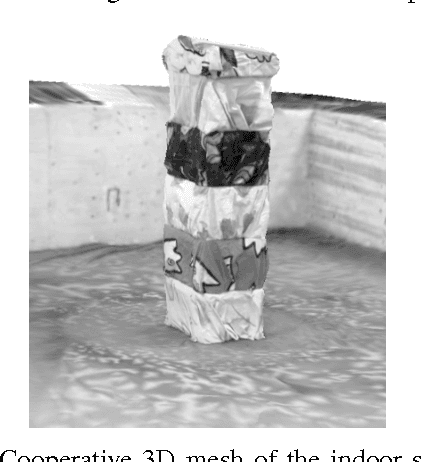
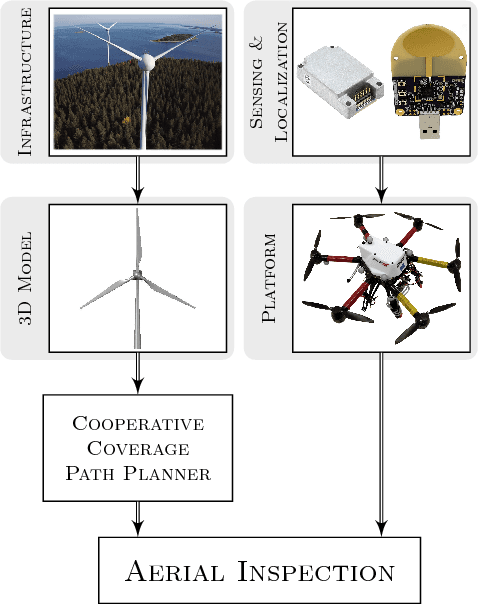
This article addresses the problem of Cooperative Coverage Path Planning (C-CPP) for the inspection of complex infrastructures (offline 3D reconstruction) by utilizing multiple Unmanned Autonomous Vehicles (UAVs). The proposed scheme, based on a priori 3D model of the infrastructure under inspection, is able to generate multiple paths for UAVs in order to achieve a complete cooperative coverage in a short time. Initially the infrastructure under inspection is being sliced by horizontal planes, which has the capability of recognizing the branches of the structure and these branches will be handled as breaking points for the path planning of the UAVs to collaboratively execute the coverage task in less time and more realistically, based on the current flying times of the UAVs. The multiple data sets collected from the coverage are merged for the offline sparse and dense 3D reconstruction of the infrastructure by utilizing SLAM and Structure from Motion approaches, with either monocular or stereo sensors. The performance of the proposed C-CPP has been experimentally evaluated in multiple indoor and realistic outdoor infrastructure inspection experiments.