 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Addendum to NeBula: Towards Extending TEAM CoSTAR's Solution to Larger Scale Environments
Apr 18, 2025This paper presents an appendix to the original NeBula autonomy solution developed by the TEAM CoSTAR (Collaborative SubTerranean Autonomous Robots), participating in the DARPA Subterranean Challenge. Specifically, this paper presents extensions to NeBula's hardware, software, and algorithmic components that focus on increasing the range and scale of the exploration environment. From the algorithmic perspective, we discuss the following extensions to the original NeBula framework: (i) large-scale geometric and semantic environment mapping; (ii) an adaptive positioning system; (iii) probabilistic traversability analysis and local planning; (iv) large-scale POMDP-based global motion planning and exploration behavior; (v) large-scale networking and decentralized reasoning; (vi) communication-aware mission planning; and (vii) multi-modal ground-aerial exploration solutions. We demonstrate the application and deployment of the presented systems and solutions in various large-scale underground environments, including limestone mine exploration scenarios as well as deployment in the DARPA Subterranean challenge.
Towards Energy Efficient Autonomous Exploration of Mars Lava Tube with a Martian Coaxial Quadrotor
Nov 13, 2022Mapping and exploration of a Martian terrain with an aerial vehicle has become an emerging research direction, since the successful flight demonstration of the Mars helicopter Ingenuity. Although the autonomy and navigation capability of the state of the art Mars helicopter has proven to be efficient in an open environment, the next area of interest for exploration on Mars are caves or ancient lava tube like environments, especially towards the never-ending search of life on other planets. This article presents an autonomous exploration mission based on a modified frontier approach along with a risk aware planning and integrated collision avoidance scheme with a special focus on energy aspects of a custom designed Mars Coaxial Quadrotor (MCQ) in a Martian simulated lava tube. One of the biggest novelties of the article stems from addressing the exploration capability, while rapidly exploring in local areas and intelligently global re-positioning of the MCQ when reaching dead ends in order to to efficiently use the battery based consumed energy, while increasing the volume of the exploration. The proposed three layer cost based global re-position point selection assists in rapidly redirecting the MCQ to previously partially seen areas that could lead to more unexplored part of the lava tube. The Martian fully simulated mission presented in this article takes into consideration the fidelity of physics of Mars condition in terms of thin atmosphere, low surface pressure and low gravity of the planet, while proves the efficiency of the proposed scheme in exploring an area that is particularly challenging due to the subterranean-like environment. The proposed exploration-planning framework is also validated in simulation by comparing it against the graph based exploration planner.
Design and Model Predictive Control of Mars Coaxial Quadrotor
Oct 01, 2021
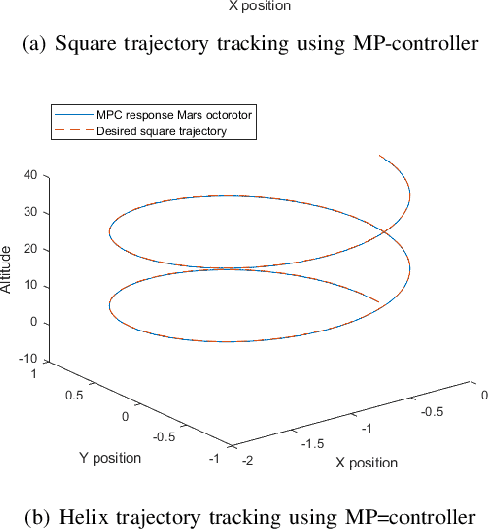
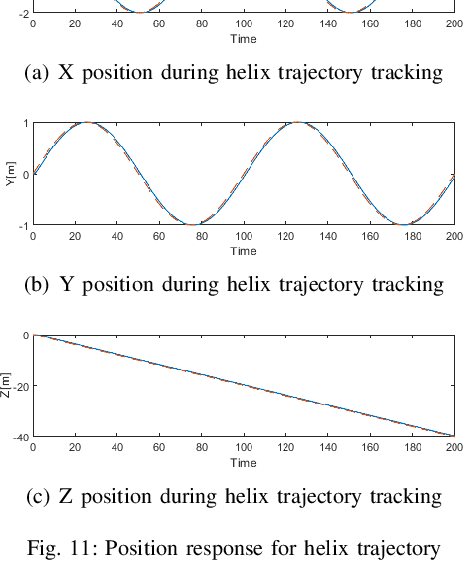
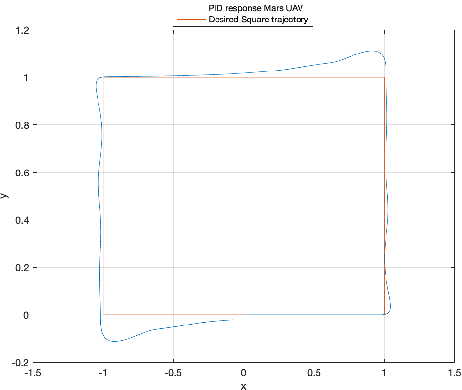
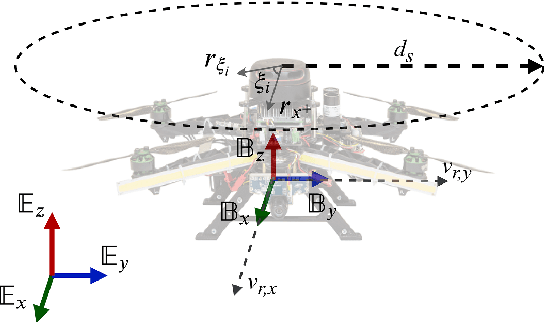
Mars has been a prime candidate for planetary exploration of the solar system because of the science discoveries that support chances of future habitation on this planet. Martian caves and lava tubes like terrains, which consists of uneven ground, poor visibility and confined space, makes it impossible for wheel based rovers to navigate through these areas. In order to address these limitations and advance the exploration capability in a Martian terrain, this article presents the design and control of a novel coaxial quadrotor Micro Aerial Vehicle (MAV). As it will be presented, the key contributions on the design and control architecture of the proposed Mars coaxial quadrotor, are introducing an alternative and more enhanced, from a control point of view concept, when compared in terms of autonomy to Ingenuity. Based on the presented design, the article will introduce the mathematical modelling and automatic control framework of the vehicle that will consist of a linearised model of a co-axial quadrotor and a corresponding Model Predictive Controller (MPC) for the trajectory tracking. Among the many models, proposed for the aerial flight on Mars, a reliable control architecture lacks in the related state of the art. The MPC based closed loop responses of the proposed MAV will be verified in different conditions during the flight with additional disturbances, induced to replicate a real flight scenario. In order to further validate the proposed control architecture and prove the efficacy of the suggested design, the introduced Mars coaxial quadrotor and the MPC scheme will be compared to a PID-type controller, similar to the Ingenuity helicopter's control architecture for the position and the heading.
A Unified NMPC Scheme for MAVs Navigation with 3D Collision Avoidance under Position Uncertainty
Jul 31, 2020
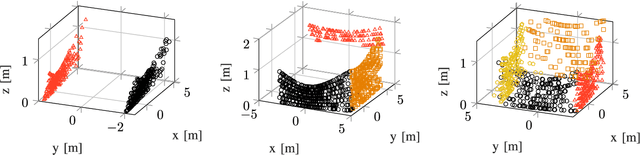
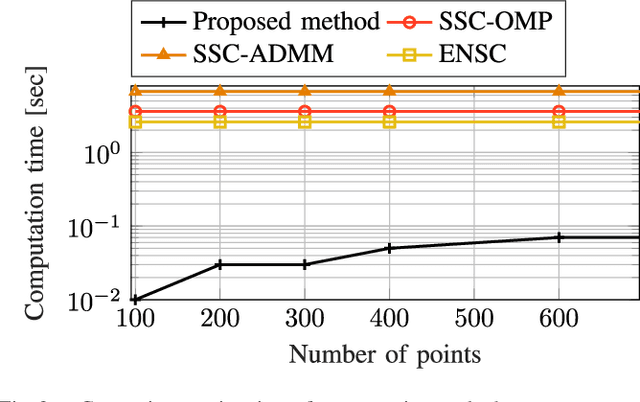

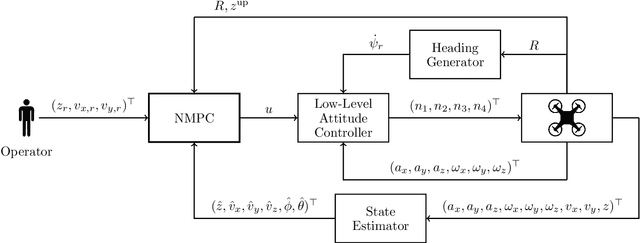
This article proposes a novel Nonlinear Model Predictive Control (NMPC) framework for Micro Aerial Vehicle (MAV) autonomous navigation in constrained environments. The introduced framework allows us to consider the nonlinear dynamics of MAVs and guarantees real-time performance. Our first contribution is to design a computationally efficient subspace clustering method to reveal from geometrical constraints to underlying constraint planes within a 3D point cloud, obtained from a 3D lidar scanner. The second contribution of our work is to incorporate the extracted information into the nonlinear constraints of NMPC for avoiding collisions. Our third contribution focuses on making the controller robust by considering the uncertainty of localization and NMPC using the Shannon entropy. This step enables us to track either the position or velocity references, or none of them if necessary. As a result, the collision avoidance constraints are defined in the local coordinates of MAVs and it remains active and guarantees collision avoidance, despite localization uncertainties, e.g., position estimation drifts. Additionally, as the platform continues the mission, this will result in less uncertain position estimations, due to the feature extraction and loop closure. The efficacy of the suggested framework has been evaluated using various simulations in the Gazebo environment.
Subterranean MAV Navigation based on Nonlinear MPC with Collision Avoidance Constraints
Jun 07, 2020

Micro Aerial Vehicles (MAVs) navigation in subterranean environments is gaining attention in the field of aerial robotics, however there are still multiple challenges for collision free navigation in such harsh environments. This article proposes a novel baseline solution for collision free navigation with Nonlinear Model Predictive Control (NMPC). In the proposed method, the MAV is considered as a floating object, where the velocities on the $x$, $y$ axes and the position on altitude are the references for the NMPC to navigate along the tunnel, while the NMPC avoids the collision by considering kinematics of the obstacles based on measurements from a 2D lidar. Moreover, a novel approach for correcting the heading of the MAV towards the center of the mine tunnel is proposed, while the efficacy of the suggested framework has been evaluated in multiple field trials in an underground mine in Sweden.