 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn NMPC-ECBF Framework for Dynamic Motion Planning and Execution in vision-based Human-Robot Collaboration
Apr 14, 2023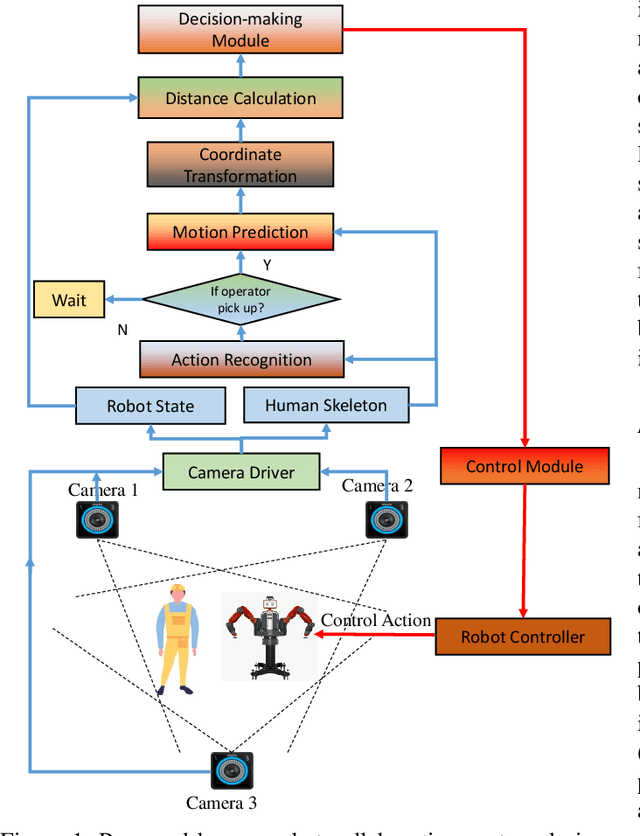
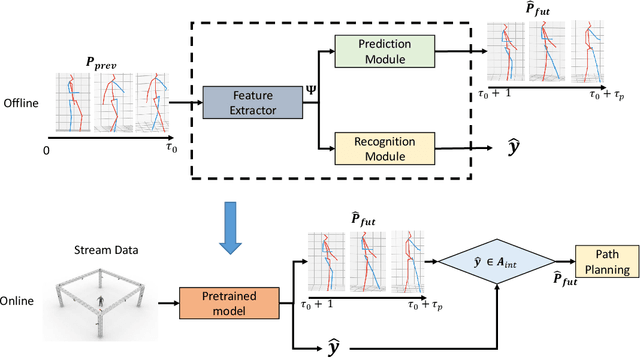


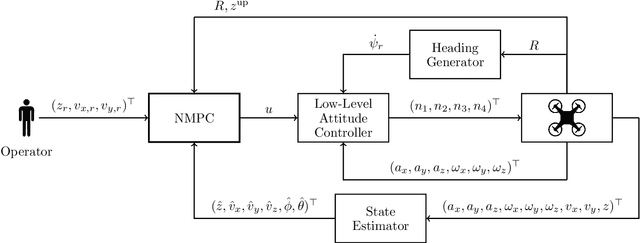
To enable safe and effective human-robot collaboration (HRC) in smart manufacturing, seamless integration of sensing, cognition, and prediction into the robot controller is critical for real-time awareness, response, and communication inside a heterogeneous environment (robots, humans, and equipment). The proposed approach takes advantage of the prediction capabilities of nonlinear model predictive control (NMPC) to execute a safe path planning based on feedback from a vision system. In order to satisfy the requirement of real-time path planning, an embedded solver based on a penalty method is applied. However, due to tight sampling times NMPC solutions are approximate, and hence the safety of the system cannot be guaranteed. To address this we formulate a novel safety-critical paradigm with an exponential control barrier function (ECBF) used as a safety filter. We also design a simple human-robot collaboration scenario using V-REP to evaluate the performance of the proposed controller and investigate whether integrating human pose prediction can help with safe and efficient collaboration. The robot uses OptiTrack cameras for perception and dynamically generates collision-free trajectories to the predicted target interactive position. Results for a number of different configurations confirm the efficiency of the proposed motion planning and execution framework. It yields a 19.8% reduction in execution time for the HRC task considered.
Collision avoidance for multiple MAVs using fast centralized NMPC
Sep 02, 2021
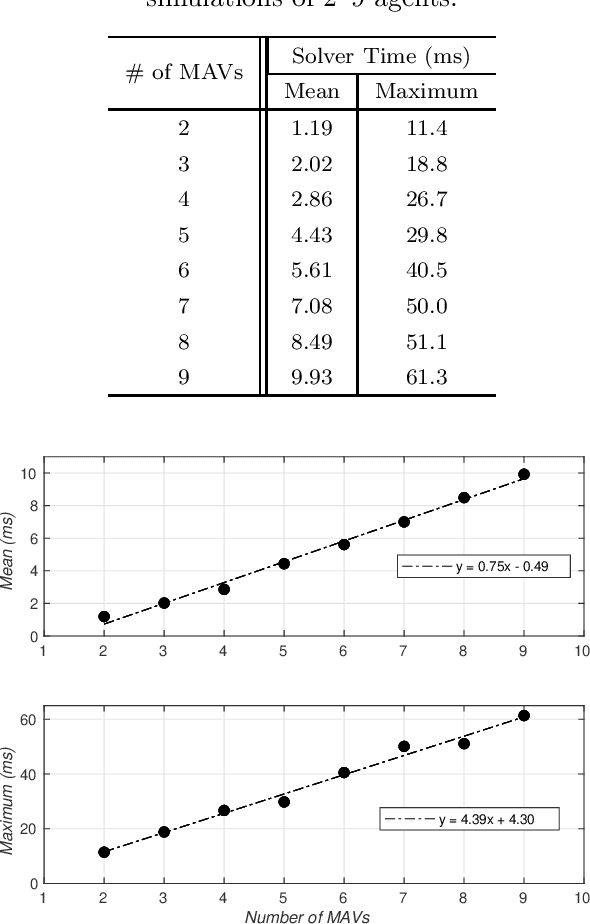
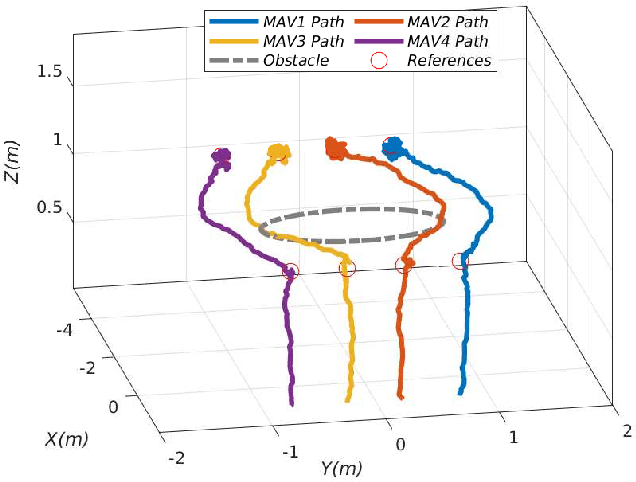
This article proposes a novel control architecture using a centralized nonlinear model predictive control (CNMPC) scheme for controlling multiple micro aerial vehicles (MAVs). The control architecture uses an augmented state system to control multiple agents and performs both obstacle and collision avoidance. The optimization algorithm used is OpEn, based on the proximal averaged Newton type method for optimal control (PANOC) which provides fast convergence for non-convex optimization problems. The objective is to perform position reference tracking for each individual agent, while nonlinear constrains guarantee collision avoidance and smooth control signals. To produce a trajectory that satisfies all constraints a penalty method is applied to the nonlinear constraints. The efficacy of this proposed novel control scheme is successfully demonstrated through simulation results and comparisons, in terms of computation time and constraint violations, while are provided with respect to the number of agents.
* 8 pages, 10 figures
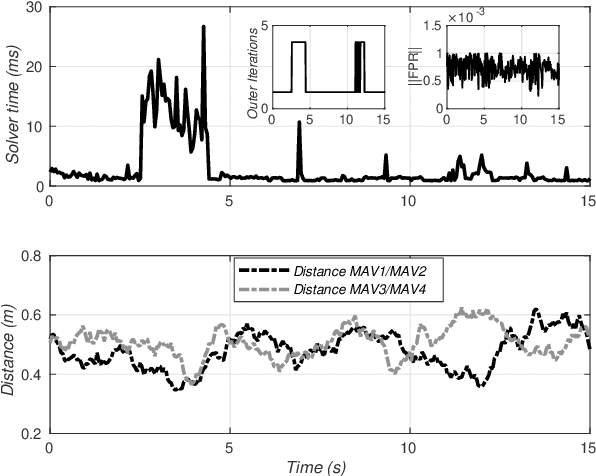
A Scalable Distributed Collision Avoidance Scheme for Multi-agent UAV systems
Apr 08, 2021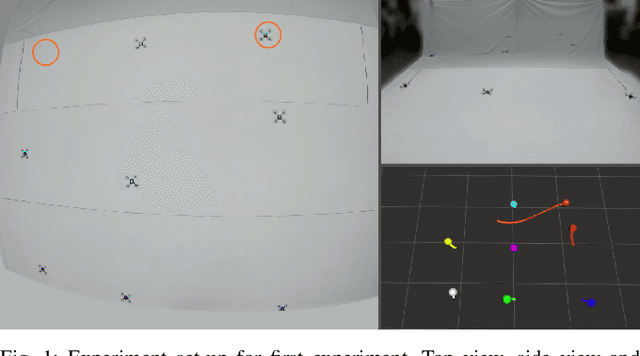
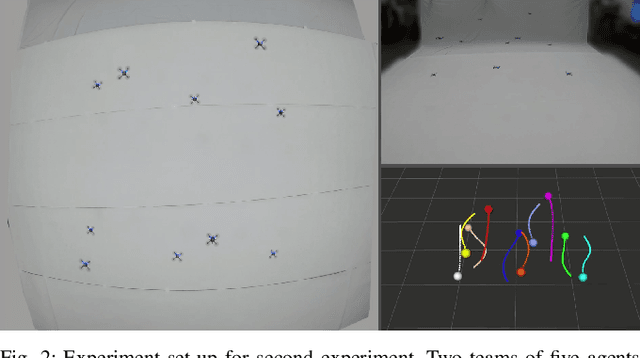
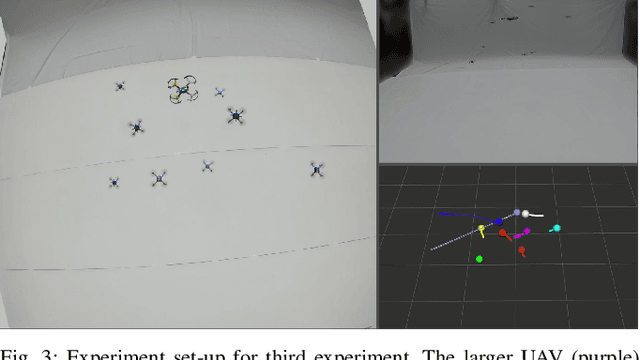
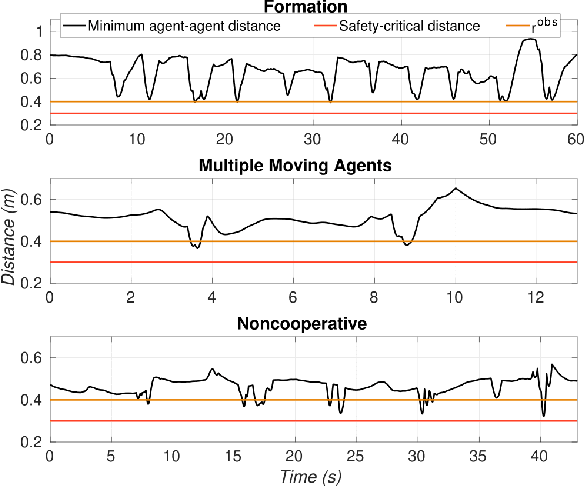
In this article we propose a distributed collision avoidance scheme for multi-agent unmanned aerial vehicles(UAVs) based on nonlinear model predictive control (NMPC),where other agents in the system are considered as dynamic obstacles with respect to the ego agent. Our control scheme operates at a low level and commands roll, pitch and thrust signals at a high frequency, each agent broadcasts its predicted trajectory to the other ones, and we propose an obstacle prioritization scheme based on the shared trajectories to allow up-scaling of the system. The NMPC problem is solved using an ad hoc solver where PANOC is combined with an augmented Lagrangian method to compute collision-free trajectories. We evaluate the proposed scheme in several challenging laboratory experiments for up to ten aerial agents, in dense aerial swarms.
Subterranean MAV Navigation based on Nonlinear MPC with Collision Avoidance Constraints
Jun 07, 2020
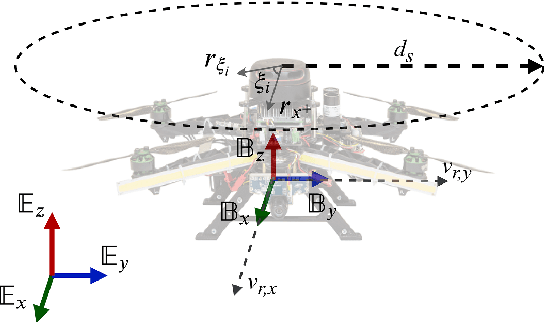

Micro Aerial Vehicles (MAVs) navigation in subterranean environments is gaining attention in the field of aerial robotics, however there are still multiple challenges for collision free navigation in such harsh environments. This article proposes a novel baseline solution for collision free navigation with Nonlinear Model Predictive Control (NMPC). In the proposed method, the MAV is considered as a floating object, where the velocities on the $x$, $y$ axes and the position on altitude are the references for the NMPC to navigate along the tunnel, while the NMPC avoids the collision by considering kinematics of the obstacles based on measurements from a 2D lidar. Moreover, a novel approach for correcting the heading of the MAV towards the center of the mine tunnel is proposed, while the efficacy of the suggested framework has been evaluated in multiple field trials in an underground mine in Sweden.
Visual Area Coverage with Attitude-Dependent Camera Footprints by Particle Harvesting
Sep 15, 2019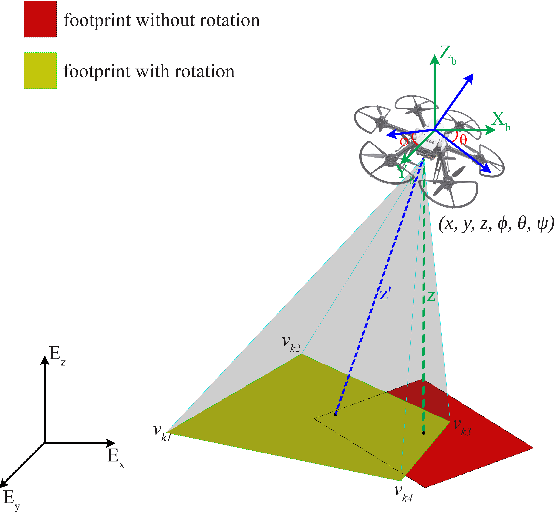
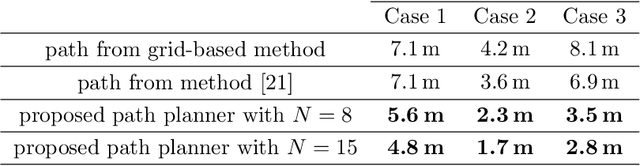

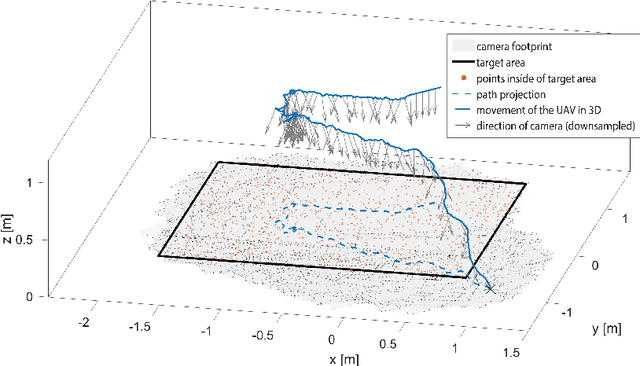
In aerial visual area coverage missions, the camera footprint changes over time based on the camera position and orientation -- a fact that complicates the whole process of coverage and path planning. This article proposes a solution to the problem of visual coverage by filling the target area with a set of randomly distributed particles and harvesting them by camera footprints. This way, high coverage is obtained at a low computational cost. In this approach, the path planner considers six degrees of freedom (DoF) for the camera movement and commands thrust and attitude references to a lower layer controller, while maximizing the covered area and coverage quality. The proposed method requires a priori information of the boundaries of the target area and can handle areas of very complex and highly non-convex geometry. The effectiveness of the approach is demonstrated in multiple simulations in terms of computational efficiency and coverage.