 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn NMPC-ECBF Framework for Dynamic Motion Planning and Execution in vision-based Human-Robot Collaboration
Apr 14, 2023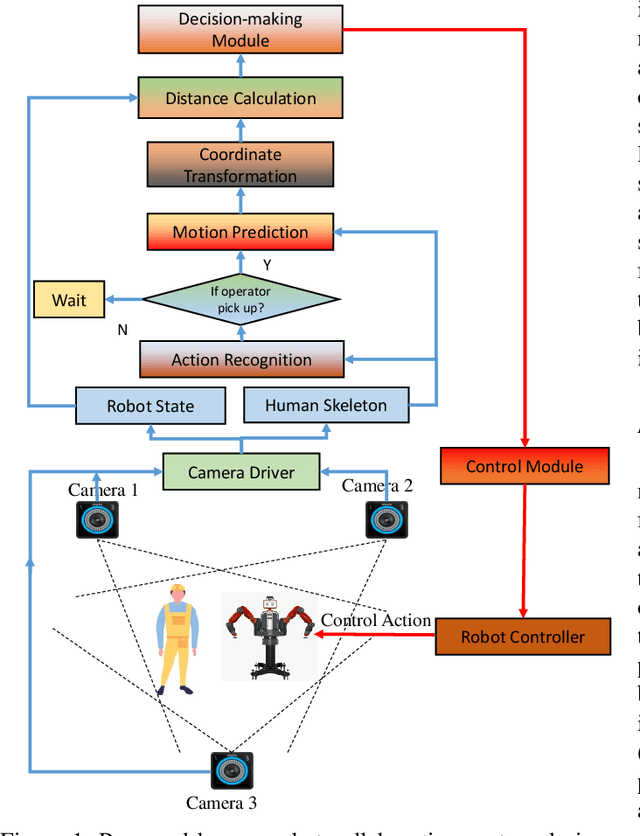


To enable safe and effective human-robot collaboration (HRC) in smart manufacturing, seamless integration of sensing, cognition, and prediction into the robot controller is critical for real-time awareness, response, and communication inside a heterogeneous environment (robots, humans, and equipment). The proposed approach takes advantage of the prediction capabilities of nonlinear model predictive control (NMPC) to execute a safe path planning based on feedback from a vision system. In order to satisfy the requirement of real-time path planning, an embedded solver based on a penalty method is applied. However, due to tight sampling times NMPC solutions are approximate, and hence the safety of the system cannot be guaranteed. To address this we formulate a novel safety-critical paradigm with an exponential control barrier function (ECBF) used as a safety filter. We also design a simple human-robot collaboration scenario using V-REP to evaluate the performance of the proposed controller and investigate whether integrating human pose prediction can help with safe and efficient collaboration. The robot uses OptiTrack cameras for perception and dynamically generates collision-free trajectories to the predicted target interactive position. Results for a number of different configurations confirm the efficiency of the proposed motion planning and execution framework. It yields a 19.8% reduction in execution time for the HRC task considered.
Adaptive Safety-critical Control with Uncertainty Estimation for Human-robot Collaboration
Apr 14, 2023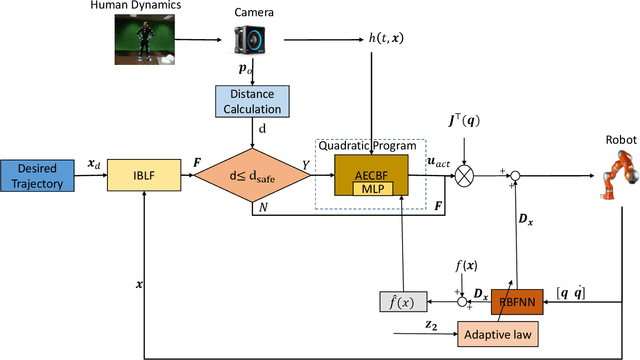
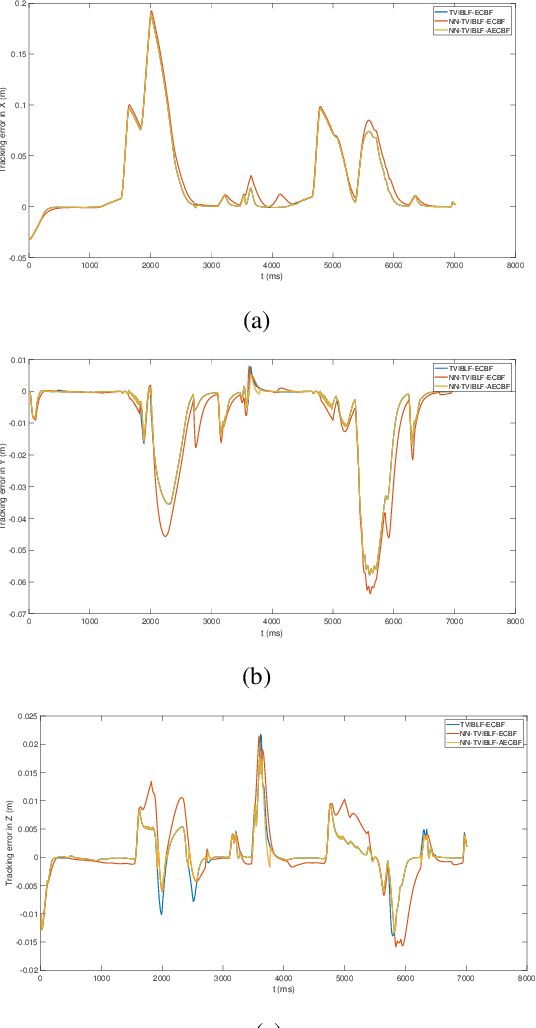
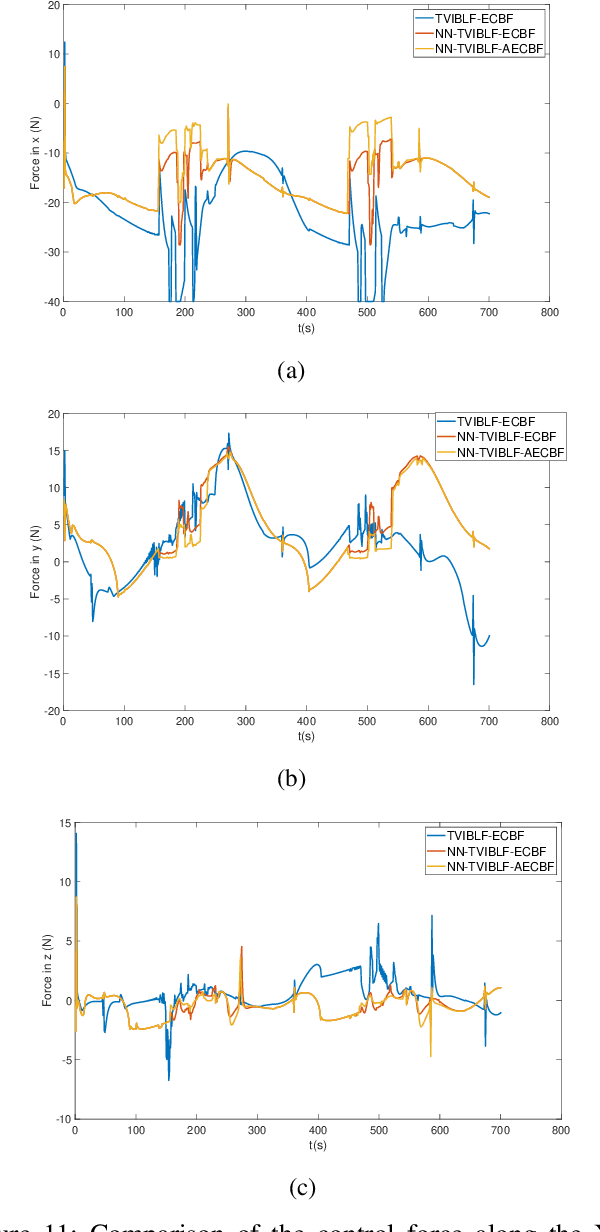
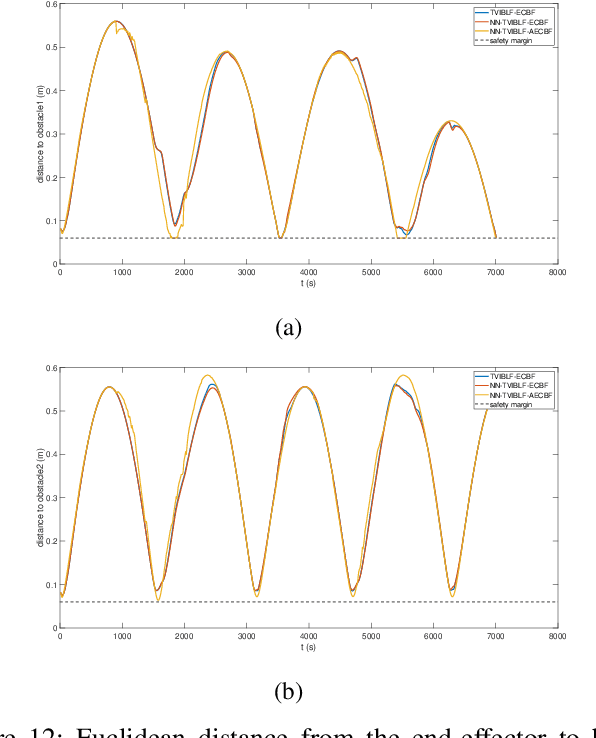
In advanced manufacturing, strict safety guarantees are required to allow humans and robots to work together in a shared workspace. One of the challenges in this application field is the variety and unpredictability of human behavior, leading to potential dangers for human coworkers. This paper presents a novel control framework by adopting safety-critical control and uncertainty estimation for human-robot collaboration. Additionally, to select the shortest path during collaboration, a novel quadratic penalty method is presented. The innovation of the proposed approach is that the proposed controller will prevent the robot from violating any safety constraints even in cases where humans move accidentally in a collaboration task. This is implemented by the combination of a time-varying integral barrier Lyapunov function (TVIBLF) and an adaptive exponential control barrier function (AECBF) to achieve a flexible mode switch between path tracking and collision avoidance with guaranteed closed-loop system stability. The performance of our approach is demonstrated in simulation studies on a 7-DOF robot manipulator. Additionally, a comparison between the tasks involving static and dynamic targets is provided.
Non-local Graph Convolutional Network for joint Activity Recognition and Motion Prediction
Aug 03, 2021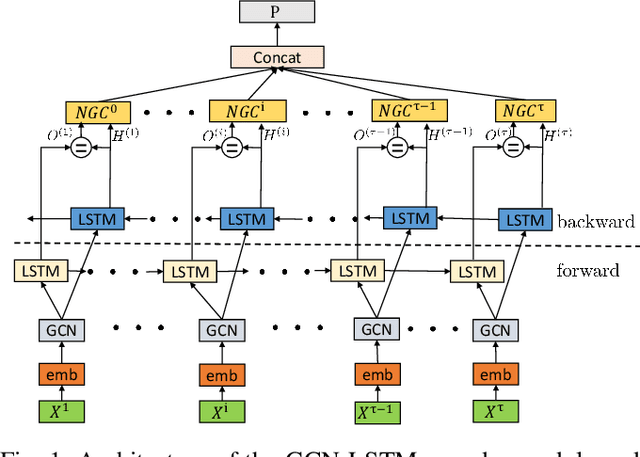

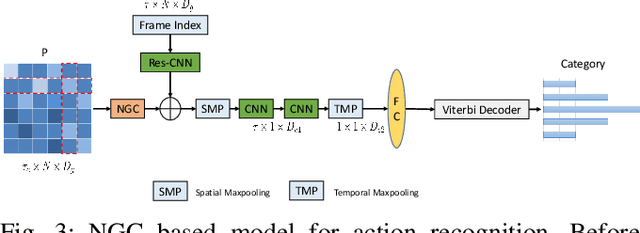
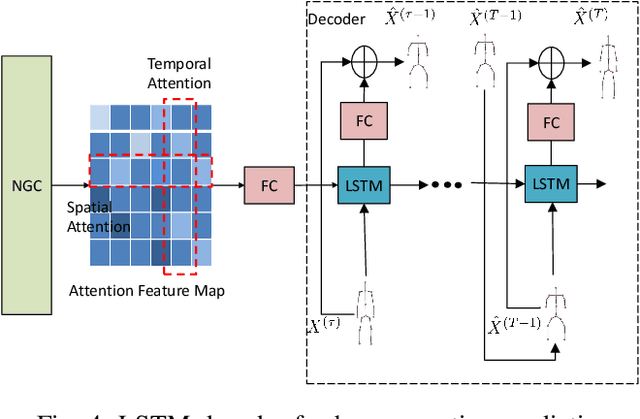
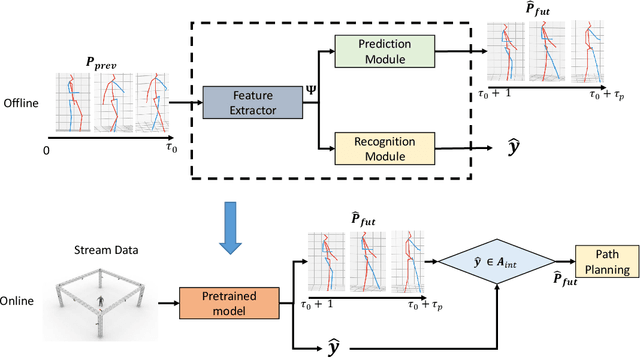
3D skeleton-based motion prediction and activity recognition are two interwoven tasks in human behaviour analysis. In this work, we propose a motion context modeling methodology that provides a new way to combine the advantages of both graph convolutional neural networks and recurrent neural networks for joint human motion prediction and activity recognition. Our approach is based on using an LSTM encoder-decoder and a non-local feature extraction attention mechanism to model the spatial correlation of human skeleton data and temporal correlation among motion frames. The proposed network can easily include two output branches, one for Activity Recognition and one for Future Motion Prediction, which can be jointly trained for enhanced performance. Experimental results on Human 3.6M, CMU Mocap and NTU RGB-D datasets show that our proposed approach provides the best prediction capability among baseline LSTM-based methods, while achieving comparable performance to other state-of-the-art methods.