 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Safety-critical Control with Uncertainty Estimation for Human-robot Collaboration
Paper and Code
Apr 14, 2023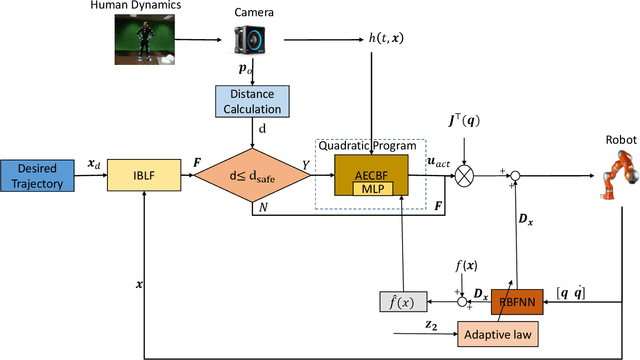
In advanced manufacturing, strict safety guarantees are required to allow humans and robots to work together in a shared workspace. One of the challenges in this application field is the variety and unpredictability of human behavior, leading to potential dangers for human coworkers. This paper presents a novel control framework by adopting safety-critical control and uncertainty estimation for human-robot collaboration. Additionally, to select the shortest path during collaboration, a novel quadratic penalty method is presented. The innovation of the proposed approach is that the proposed controller will prevent the robot from violating any safety constraints even in cases where humans move accidentally in a collaboration task. This is implemented by the combination of a time-varying integral barrier Lyapunov function (TVIBLF) and an adaptive exponential control barrier function (AECBF) to achieve a flexible mode switch between path tracking and collision avoidance with guaranteed closed-loop system stability. The performance of our approach is demonstrated in simulation studies on a 7-DOF robot manipulator. Additionally, a comparison between the tasks involving static and dynamic targets is provided.