 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDigital Twin-Driven Reinforcement Learning for Obstacle Avoidance in Robot Manipulators: A Self-Improving Online Training Framework
Mar 19, 2024



The evolution and growing automation of collaborative robots introduce more complexity and unpredictability to systems, highlighting the crucial need for robot's adaptability and flexibility to address the increasing complexities of their environment. In typical industrial production scenarios, robots are often required to be re-programmed when facing a more demanding task or even a few changes in workspace conditions. To increase productivity, efficiency and reduce human effort in the design process, this paper explores the potential of using digital twin combined with Reinforcement Learning (RL) to enable robots to generate self-improving collision-free trajectories in real time. The digital twin, acting as a virtual counterpart of the physical system, serves as a 'forward run' for monitoring, controlling, and optimizing the physical system in a safe and cost-effective manner. The physical system sends data to synchronize the digital system through the video feeds from cameras, which allows the virtual robot to update its observation and policy based on real scenarios. The bidirectional communication between digital and physical systems provides a promising platform for hardware-in-the-loop RL training through trial and error until the robot successfully adapts to its new environment. The proposed online training framework is demonstrated on the Unfactory Xarm5 collaborative robot, where the robot end-effector aims to reach the target position while avoiding obstacles. The experiment suggest that proposed framework is capable of performing policy online training, and that there remains significant room for improvement.
SLYKLatent, a Learning Framework for Facial Features Estimation
Feb 02, 2024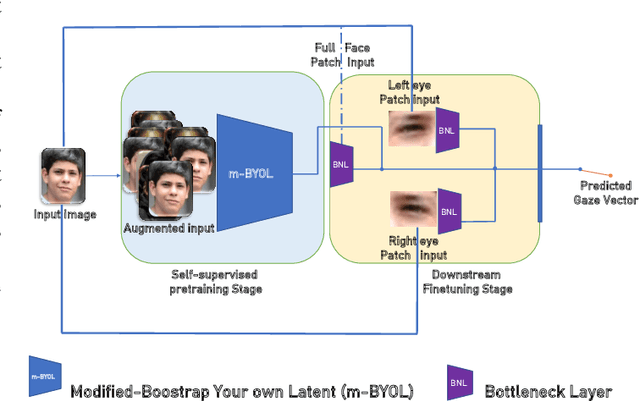
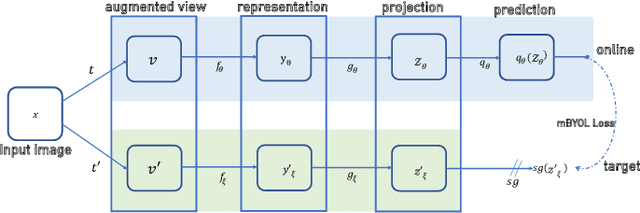
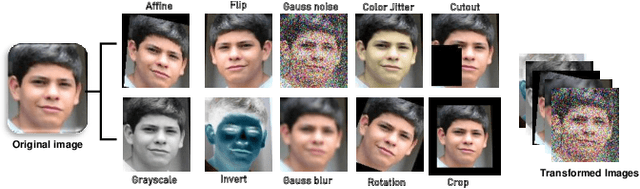
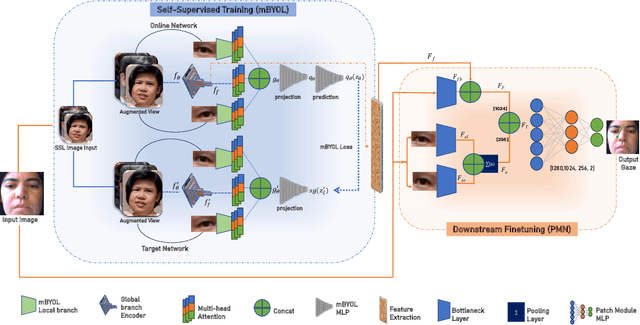
In this research, we present SLYKLatent, a novel approach for enhancing gaze estimation by addressing appearance instability challenges in datasets due to aleatoric uncertainties, covariant shifts, and test domain generalization. SLYKLatent utilizes Self-Supervised Learning for initial training with facial expression datasets, followed by refinement with a patch-based tri-branch network and an inverse explained variance-weighted training loss function. Our evaluation on benchmark datasets achieves an 8.7% improvement on Gaze360, rivals top MPIIFaceGaze results, and leads on a subset of ETH-XGaze by 13%, surpassing existing methods by significant margins. Adaptability tests on RAF-DB and Affectnet show 86.4% and 60.9% accuracies, respectively. Ablation studies confirm the effectiveness of SLYKLatent's novel components. This approach has strong potential in human-robot interaction.
An NMPC-ECBF Framework for Dynamic Motion Planning and Execution in vision-based Human-Robot Collaboration
Apr 14, 2023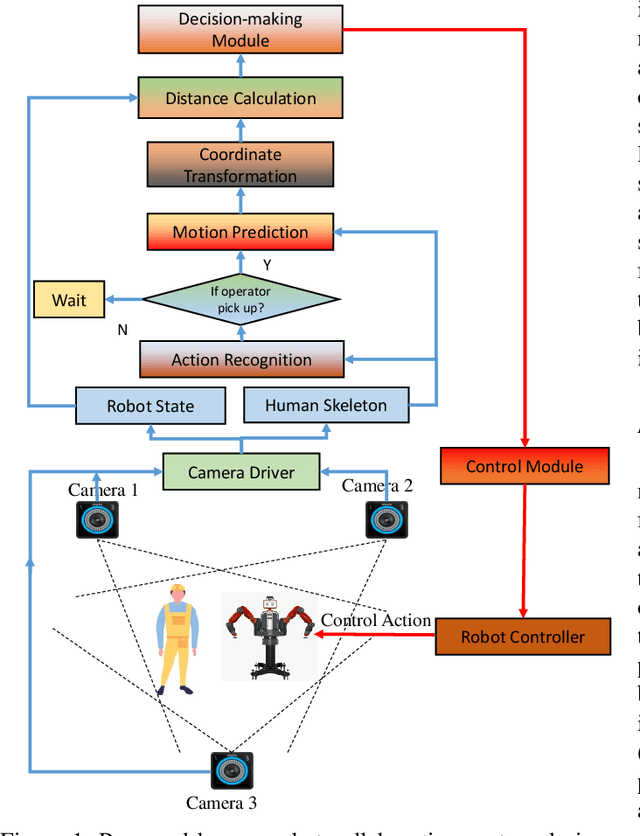
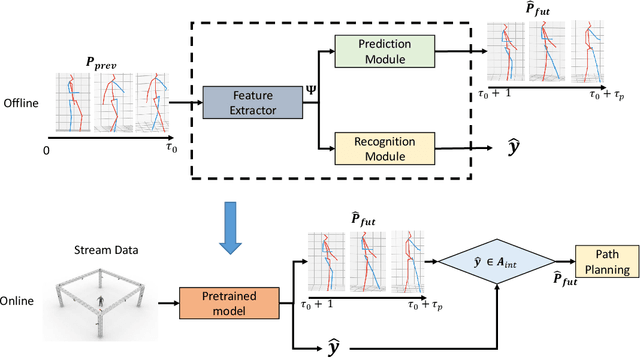


To enable safe and effective human-robot collaboration (HRC) in smart manufacturing, seamless integration of sensing, cognition, and prediction into the robot controller is critical for real-time awareness, response, and communication inside a heterogeneous environment (robots, humans, and equipment). The proposed approach takes advantage of the prediction capabilities of nonlinear model predictive control (NMPC) to execute a safe path planning based on feedback from a vision system. In order to satisfy the requirement of real-time path planning, an embedded solver based on a penalty method is applied. However, due to tight sampling times NMPC solutions are approximate, and hence the safety of the system cannot be guaranteed. To address this we formulate a novel safety-critical paradigm with an exponential control barrier function (ECBF) used as a safety filter. We also design a simple human-robot collaboration scenario using V-REP to evaluate the performance of the proposed controller and investigate whether integrating human pose prediction can help with safe and efficient collaboration. The robot uses OptiTrack cameras for perception and dynamically generates collision-free trajectories to the predicted target interactive position. Results for a number of different configurations confirm the efficiency of the proposed motion planning and execution framework. It yields a 19.8% reduction in execution time for the HRC task considered.
Adaptive Safety-critical Control with Uncertainty Estimation for Human-robot Collaboration
Apr 14, 2023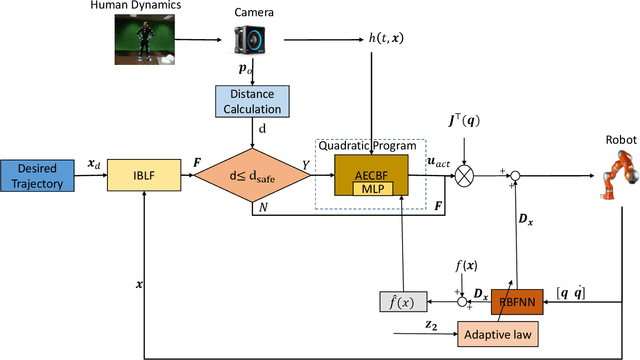
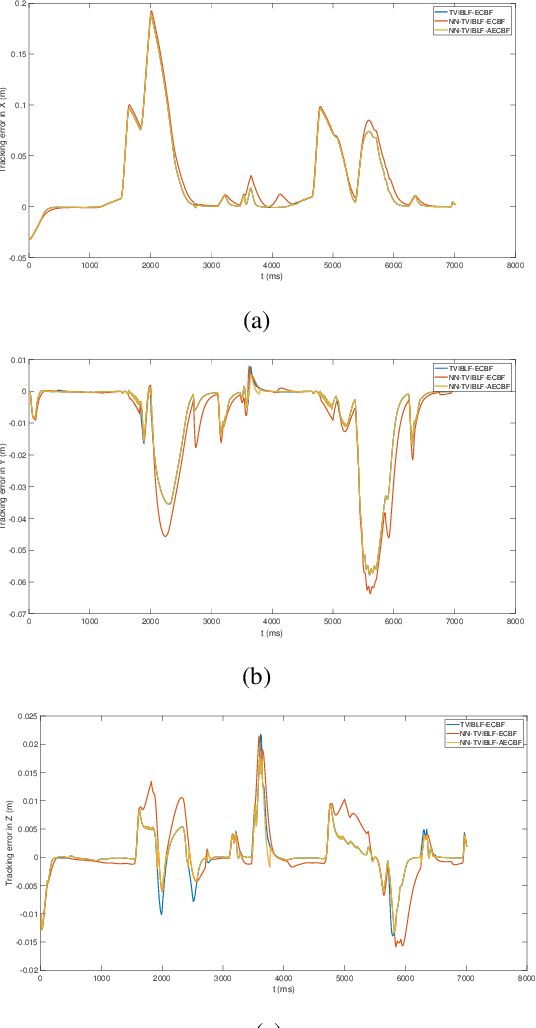
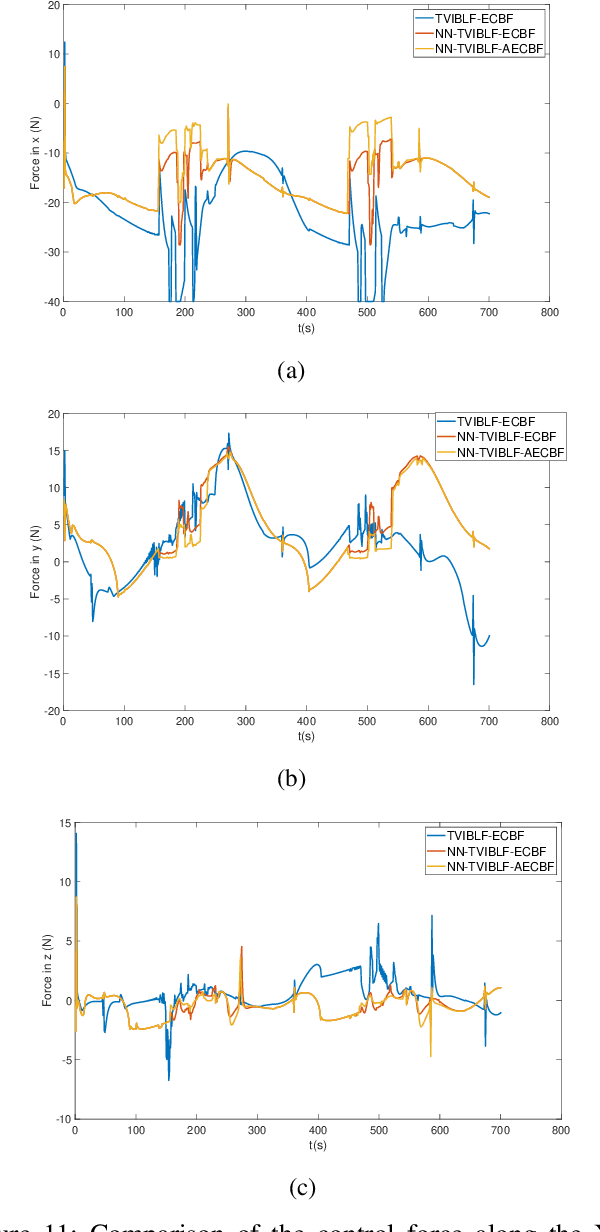
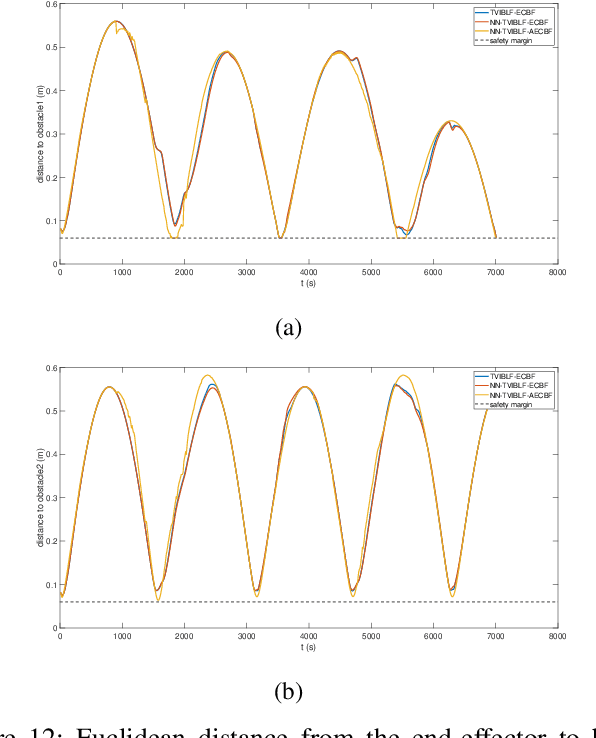
In advanced manufacturing, strict safety guarantees are required to allow humans and robots to work together in a shared workspace. One of the challenges in this application field is the variety and unpredictability of human behavior, leading to potential dangers for human coworkers. This paper presents a novel control framework by adopting safety-critical control and uncertainty estimation for human-robot collaboration. Additionally, to select the shortest path during collaboration, a novel quadratic penalty method is presented. The innovation of the proposed approach is that the proposed controller will prevent the robot from violating any safety constraints even in cases where humans move accidentally in a collaboration task. This is implemented by the combination of a time-varying integral barrier Lyapunov function (TVIBLF) and an adaptive exponential control barrier function (AECBF) to achieve a flexible mode switch between path tracking and collision avoidance with guaranteed closed-loop system stability. The performance of our approach is demonstrated in simulation studies on a 7-DOF robot manipulator. Additionally, a comparison between the tasks involving static and dynamic targets is provided.
Set based velocity shaping for robotic manipulators
Nov 10, 2022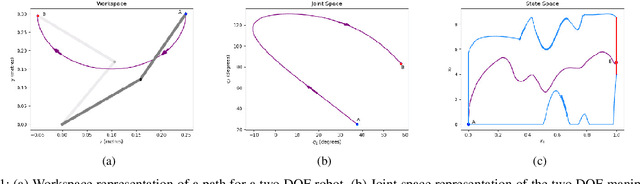
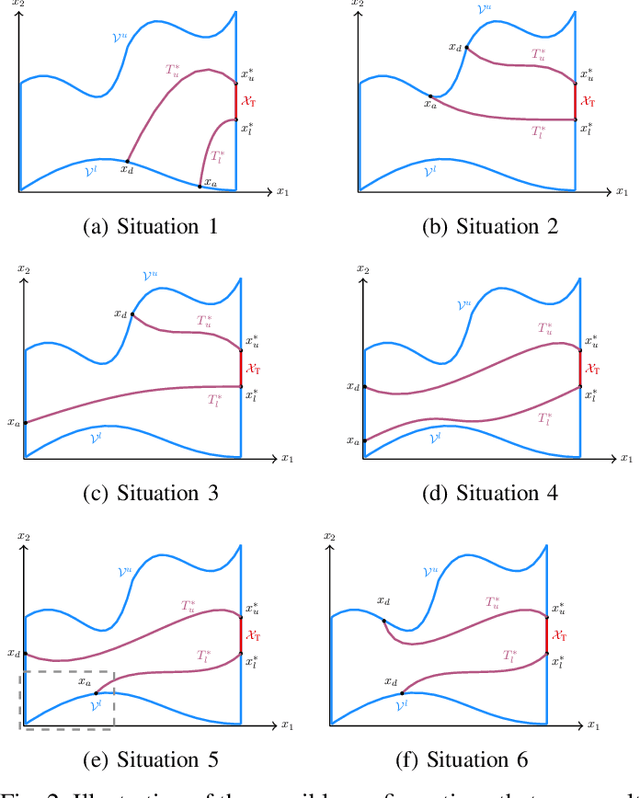
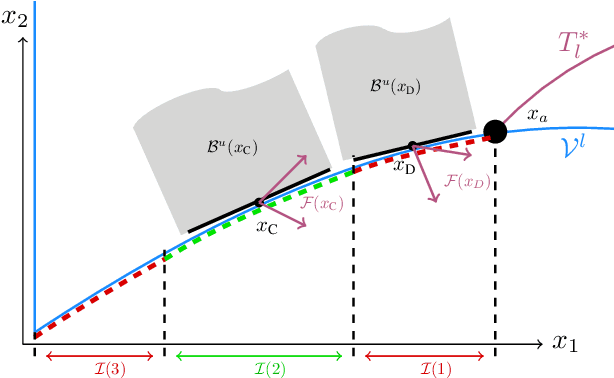
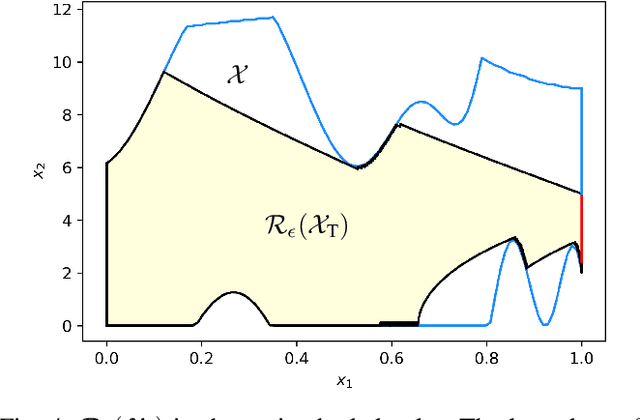
We develop a new framework for trajectory planning on predefined paths, for general N-link manipulators. Different from previous approaches generating open-loop minimum time controllers or pre-tuned motion profiles by time-scaling, we establish analytic algorithms that recover all initial conditions that can be driven to the desirable target set while adhering to environment constraints. More technologically relevant, we characterise families of corresponding safe state-feedback controllers with several desirable properties. A key enabler in our framework is the introduction of a state feedback template, that induces ordering properties between trajectories of the resulting closed-loop system. The proposed structure allows working on the nonlinear system directly in both the analysis and synthesis problems. Both offline computations and online implementation are scalable with respect to the number of links of the manipulator. The results can potentially be used in a series of challenging problems: Numerical experiments on a commercial robotic manipulator demonstrate that efficient online implementation is possible.
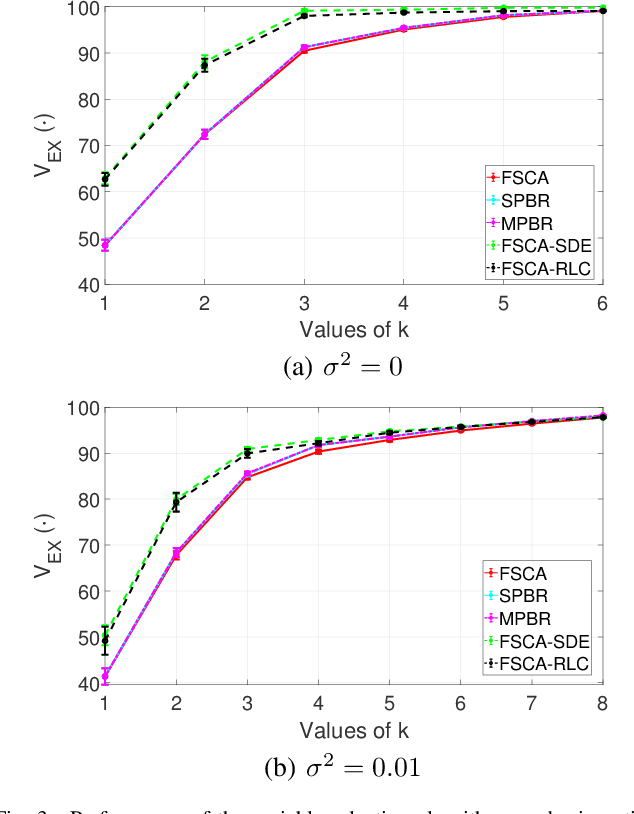
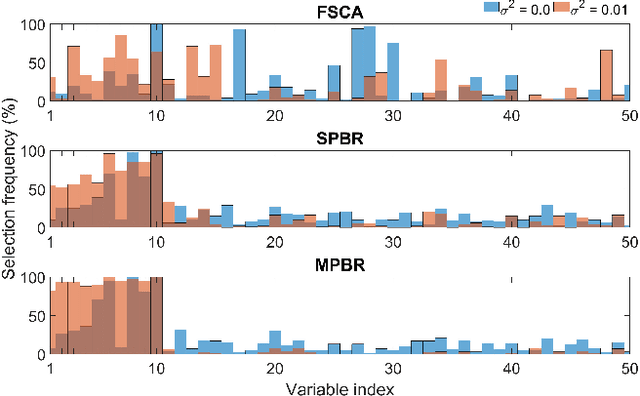
Greedy Search Algorithms for Unsupervised Variable Selection: A Comparative Study
Mar 03, 2021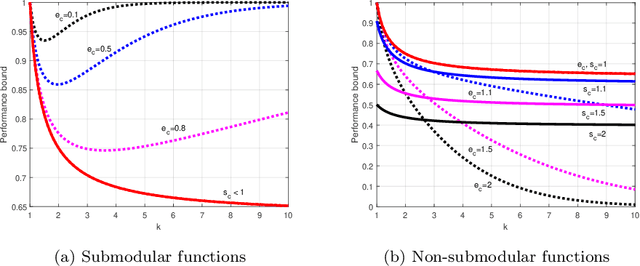
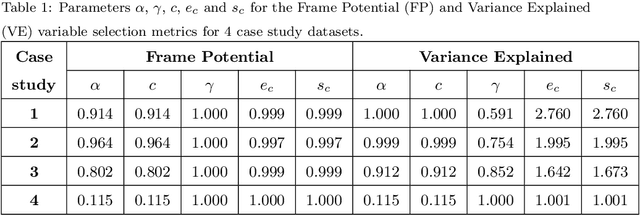
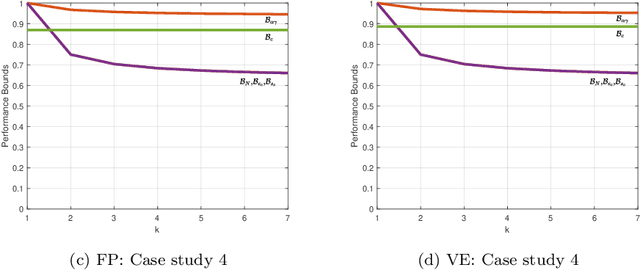
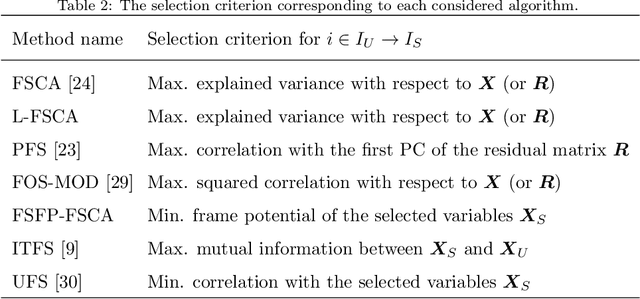
Dimensionality reduction is a important step in the development of scalable and interpretable data-driven models, especially when there are a large number of candidate variables. This paper focuses on unsupervised variable selection based dimensionality reduction, and in particular on unsupervised greedy selection methods, which have been proposed by various researchers as computationally tractable approximations to optimal subset selection. These methods are largely distinguished from each other by the selection criterion adopted, which include squared correlation, variance explained, mutual information and frame potential. Motivated by the absence in the literature of a systematic comparison of these different methods, we present a critical evaluation of seven unsupervised greedy variable selection algorithms considering both simulated and real world case studies. We also review the theoretical results that provide performance guarantees and enable efficient implementations for certain classes of greedy selection function, related to the concept of submodularity. Furthermore, we introduce and evaluate for the first time, a lazy implementation of the variance explained based forward selection component analysis (FSCA) algorithm. Our experimental results show that: (1) variance explained and mutual information based selection methods yield smaller approximation errors than frame potential; (2) the lazy FSCA implementation has similar performance to FSCA, while being an order of magnitude faster to compute, making it the algorithm of choice for unsupervised variable selection.
Material Measurement Units: Foundations Through a Survey
Mar 02, 2021

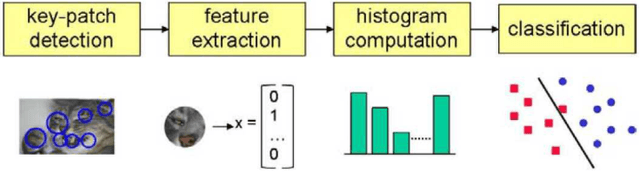

Long-term availability of minerals and industrial materials is a necessary condition for sustainable development as they are the constituents of any manufacturing product. In particular, technologies with increasing demand such as GPUs and photovoltaic panels are made of critical raw materials. To enhance the efficiency of material management, in this paper we make three main contributions: first, we identify in the literature an emerging computer-vision-enabled material monitoring technology which we call Material Measurement Unit (MMU); second, we provide a survey of works relevant to the development of MMUs; third, we describe a material stock monitoring sensor network deploying multiple MMUs.
Recovery of Linear Components: Reduced Complexity Autoencoder Designs
Dec 14, 2020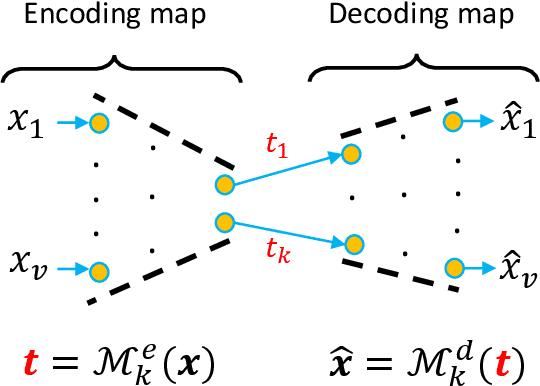
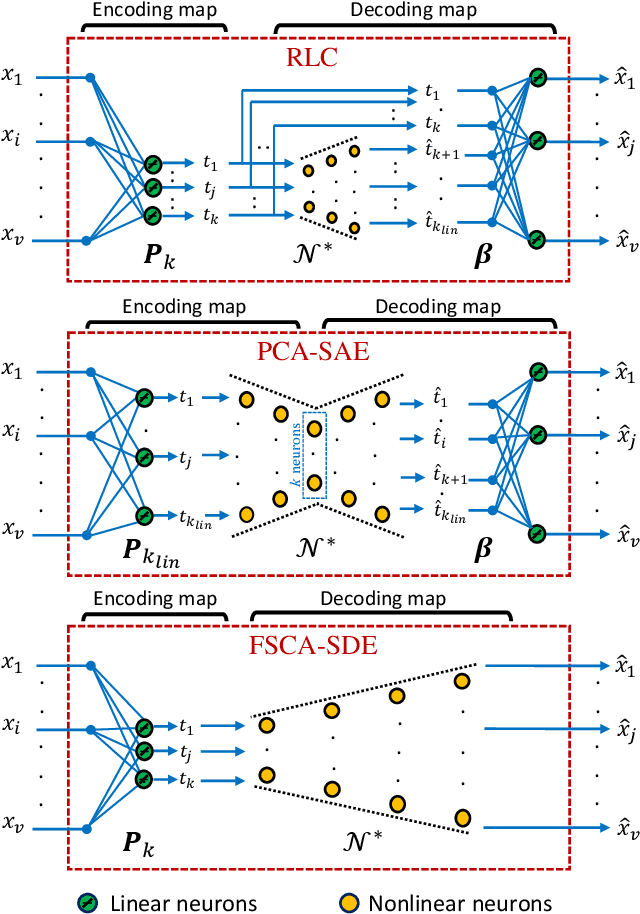
Reducing dimensionality is a key preprocessing step in many data analysis applications to address the negative effects of the curse of dimensionality and collinearity on model performance and computational complexity, to denoise the data or to reduce storage requirements. Moreover, in many applications it is desirable to reduce the input dimensions by choosing a subset of variables that best represents the entire set without any a priori information available. Unsupervised variable selection techniques provide a solution to this second problem. An autoencoder, if properly regularized, can solve both unsupervised dimensionality reduction and variable selection, but the training of large neural networks can be prohibitive in time sensitive applications. We present an approach called Recovery of Linear Components (RLC), which serves as a middle ground between linear and non-linear dimensionality reduction techniques, reducing autoencoder training times while enhancing performance over purely linear techniques. With the aid of synthetic and real world case studies, we show that the RLC, when compared with an autoencoder of similar complexity, shows higher accuracy, similar robustness to overfitting, and faster training times. Additionally, at the cost of a relatively small increase in computational complexity, RLC is shown to outperform the current state-of-the-art for a semiconductor manufacturing wafer measurement site optimization application.
An Adaptive Memory Multi-Batch L-BFGS Algorithm for Neural Network Training
Dec 14, 2020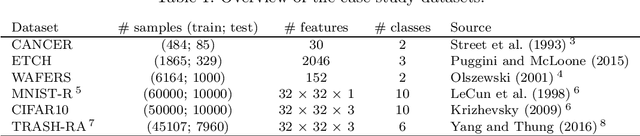
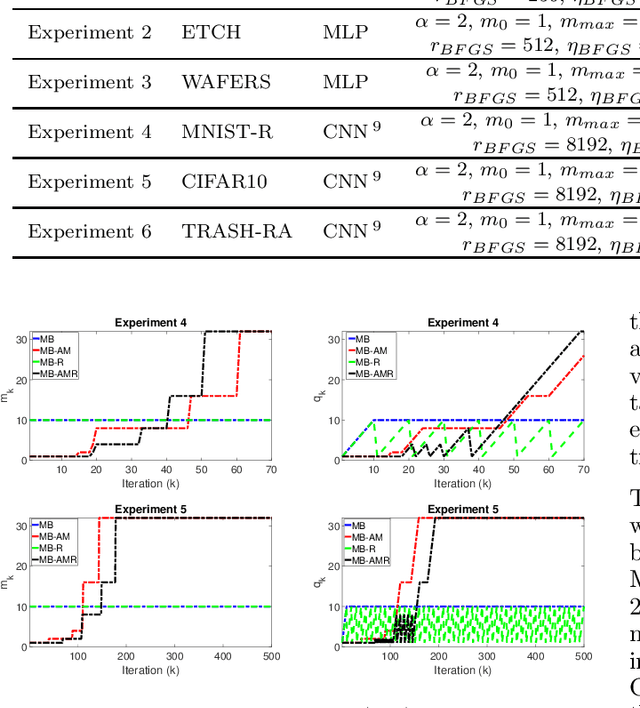
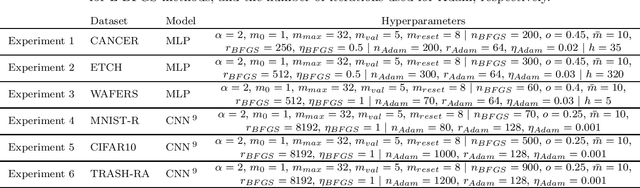
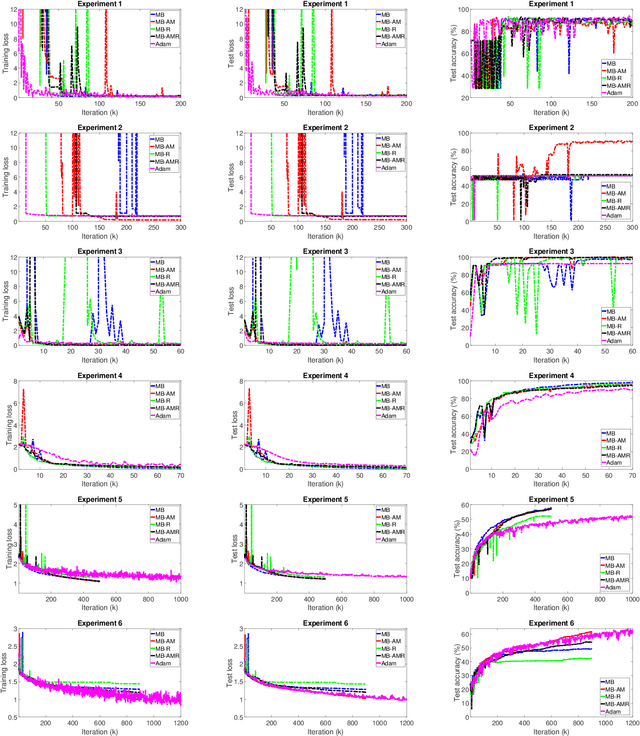
Motivated by the potential for parallel implementation of batch-based algorithms and the accelerated convergence achievable with approximated second order information a limited memory version of the BFGS algorithm has been receiving increasing attention in recent years for large neural network training problems. As the shape of the cost function is generally not quadratic and only becomes approximately quadratic in the vicinity of a minimum, the use of second order information by L-BFGS can be unreliable during the initial phase of training, i.e. when far from a minimum. Therefore, to control the influence of second order information as training progresses, we propose a multi-batch L-BFGS algorithm, namely MB-AM, that gradually increases its trust in the curvature information by implementing a progressive storage and use of curvature data through a development-based increase (dev-increase) scheme. Using six discriminative modelling benchmark problems we show empirically that MB-AM has slightly faster convergence and, on average, achieves better solutions than the standard multi-batch L-BFGS algorithm when training MLP and CNN models.