 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCIRO7.2: A Material Network with Circularity of -7.2 and Reinforcement-Learning-Controlled Robotic Disassembler
Jun 13, 2025The competition over natural reserves of minerals is expected to increase in part because of the linear-economy paradigm based on take-make-dispose. Simultaneously, the linear economy considers end-of-use products as waste rather than as a resource, which results in large volumes of waste whose management remains an unsolved problem. Since a transition to a circular economy can mitigate these open issues, in this paper we begin by enhancing the notion of circularity based on compartmental dynamical thermodynamics, namely, $\lambda$, and then, we model a thermodynamical material network processing a batch of 2 solid materials of criticality coefficients of 0.1 and 0.95, with a robotic disassembler compartment controlled via reinforcement learning (RL), and processing 2-7 kg of materials. Subsequently, we focused on the design of the robotic disassembler compartment using state-of-the-art RL algorithms and assessing the algorithm performance with respect to $\lambda$ (Fig. 1). The highest circularity is -2.1 achieved in the case of disassembling 2 parts of 1 kg each, whereas it reduces to -7.2 in the case of disassembling 4 parts of 1 kg each contained inside a chassis of 3 kg. Finally, a sensitivity analysis highlighted that the impact on $\lambda$ of the performance of an RL controller has a positive correlation with the quantity and the criticality of the materials to be disassembled. This work also gives the principles of the emerging research fields indicated as circular intelligence and robotics (CIRO). Source code is publicly available.
CiRL: Open-Source Environments for Reinforcement Learning in Circular Economy and Net Zero
May 24, 2025The demand of finite raw materials will keep increasing as they fuel modern society. Simultaneously, solutions for stopping carbon emissions in the short term are not available, thus making the net zero target extremely challenging to achieve at scale. The circular economy (CE) paradigm is gaining attention as a solution to address climate change and the uncertainties of supplies of critical materials. Hence, in this paper, we introduce CiRL, a deep reinforcement learning (DRL) library of environments focused on the circularity of both solid and fluid materials. The integration of DRL into the design of material circularity is possible thanks to the formalism of thermodynamical material networks, which is underpinned by compartmental dynamical thermodynamics. Along with the focus on circularity, this library has three more features: the new CE-oriented environments are in the state-space form, which is typically used in dynamical systems analysis and control designs; it is based on a state-of-the-art Python library of DRL algorithms, namely, Stable-Baselines3; and it is developed in Google Colaboratory to be accessible to researchers from different disciplines and backgrounds as is often the case for circular economy researchers and engineers. CiRL is publicly available.
Circular Microalgae-Based Carbon Control for Net Zero
Feb 04, 2025



The alteration of the climate in various areas of the world is of increasing concern since climate stability is a necessary condition for human survival as well as every living organism. The main reason of climate change is the greenhouse effect caused by the accumulation of carbon dioxide in the atmosphere. In this paper, we design a networked system underpinned by compartmental dynamical thermodynamics to circulate the atmospheric carbon dioxide. Specifically, in the carbon dioxide emitter compartment, we develop an initial-condition-dependent finite-time stabilizing controller that guarantees stability within a desired time leveraging the system property of affinity in the control. Then, to compensate for carbon emissions we show that a cultivation of microalgae with a volume 625 times bigger than the one of the carbon emitter is required. To increase the carbon uptake of the microalgae, we implement the nonaffine-in-the-control microalgae dynamical equations as an environment of a state-of-the-art library for reinforcement learning (RL), namely, Stable-Baselines3, and then, through the library, we test the performance of eight RL algorithms for training a controller that maximizes the microalgae absorption of carbon through the light intensity. All the eight controllers increased the carbon absorption of the cultivation during a training of 200,000 time steps with a maximum episode length of 200 time steps and with no termination conditions. This work is a first step towards approaching net zero as a classical and learning-based network control problem. The source code is publicly available.
A Unification Between Deep-Learning Vision, Compartmental Dynamical Thermodynamics, and Robotic Manipulation for a Circular Economy
May 23, 2024The shift from a linear to a circular economy has the potential to simultaneously reduce uncertainties of material supplies and waste generation. To date, the development of robotic and, more generally, autonomous systems have been rarely integrated into circular economy implementation strategies. In this review, we merge deep-learning vision, compartmental dynamical thermodynamics, and robotic manipulation into a theoretically-coherent physics-based research framework to lay the foundations of circular flow designs of materials, and hence, to speed-up the transition from linearity to circularity. Then, we discuss opportunities for robotics in circular economy.
Synchronized Object Detection for Autonomous Sorting, Mapping, and Quantification of Medical Materials
May 10, 2024



The circular economy paradigm is gaining interest as a solution to reduce both material supply uncertainties and waste generation. One of the main challenges is monitoring materials, since in general, something that is not measured cannot be effectively managed. In this paper, we propose real-time synchronized object detection to enable, at the same time, autonomous sorting, mapping, and quantification of end-of-life medical materials. Dataset, code, and demo videos are publicly available.
Towards a Thermodynamical Deep-Learning-Vision-Based Flexible Robotic Cell for Circular Healthcare
Feb 08, 2024The dependence on finite reserves of raw materials and the production of waste are two unsolved problems of the traditional linear economy. Healthcare, as a major sector of any nation, is currently facing them. Hence, in this paper, we report theoretical and practical advances of robotic reprocessing of small medical devices. Specifically, on the theory, we combine compartmental dynamical thermodynamics with the mechanics of robots to integrate robotics into a system-level perspective, and then, propose graph-based circularity indicators by leveraging our thermodynamic framework. Our thermodynamic framework is also a step forward in defining the theoretical foundations of circular material flow designs as it improves material flow analysis (MFA) by adding dynamical energy balances to the usual mass balances. On the practice, we report on the on-going design of a flexible robotic cell enabled by deep-learning vision for resources mapping and quantification, disassembly, and waste sorting of small medical devices.
Visual Material Characteristics Learning for Circular Healthcare
Sep 09, 2023



The linear take-make-dispose paradigm at the foundations of our traditional economy is proving to be unsustainable due to waste pollution and material supply uncertainties. Hence, increasing the circularity of material flows is necessary. In this paper, we make a step towards circular healthcare by developing several vision systems targeting three main circular economy tasks: resources mapping and quantification, waste sorting, and disassembly. The performance of our systems demonstrates that representation-learning vision can improve the recovery chain, where autonomous systems are key enablers due to the contamination risks. We also published two fully-annotated datasets for image segmentation and for key-point tracking in disassembly operations of inhalers and glucose meters. The datasets and source code are publicly available.
Digital Twins for Marine Operations: A Brief Review on Their Implementation
Jan 16, 2023


While the concept of a digital twin to support maritime operations is gaining attention for predictive maintenance, real-time monitoring, control, and overall process optimization, clarity on its implementation is missing in the literature. Therefore, in this review we show how different authors implemented their digital twins, discuss our findings, and finally give insights on future research directions.
Towards More Efficient EfficientDets and Low-Light Real-Time Marine Debris Detection
Mar 14, 2022
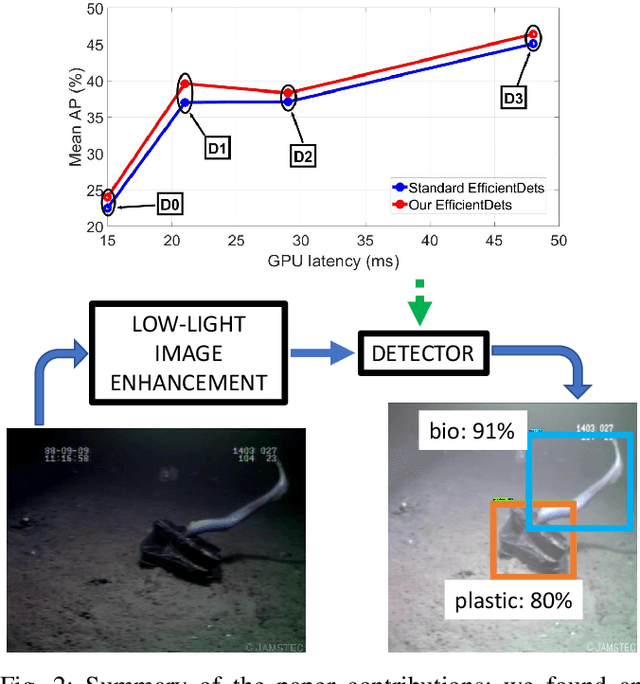
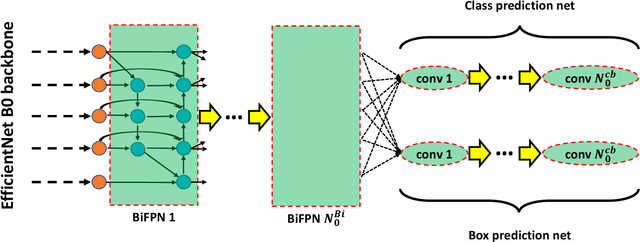
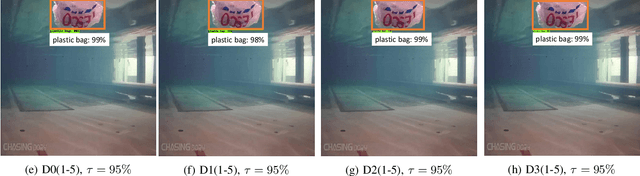
Marine debris is a problem both for the health of marine environments and for the human health since tiny pieces of plastic called "microplastics" resulting from the debris decomposition over the time are entering the food chain at any levels. For marine debris detection and removal, autonomous underwater vehicles (AUVs) are a potential solution. In this letter, we focus on the efficiency of AUV vision for real-time and low-light object detection. First, we improved the efficiency of a class of state-of-the-art object detectors, namely EfficientDets, by 1.5% AP on D0, 2.6% AP on D1, 1.2% AP on D2 and 1.3% AP on D3 without increasing the GPU latency. Subsequently, we created and made publicly available a dataset for the detection of in-water plastic bags and bottles and trained our improved EfficientDets on this and another dataset for marine debris detection. Finally, we investigated how the detector performance is affected by low-light conditions and compared two low-light underwater image enhancement strategies both in terms of accuracy and latency. Source code and dataset are publicly available.
Greedy Search Algorithms for Unsupervised Variable Selection: A Comparative Study
Mar 03, 2021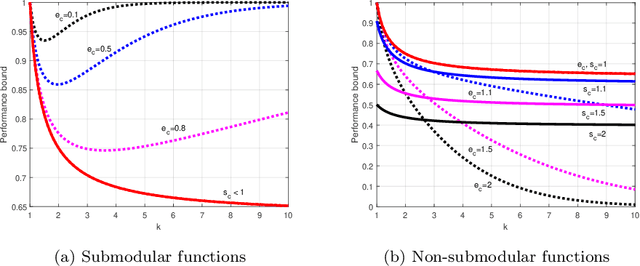
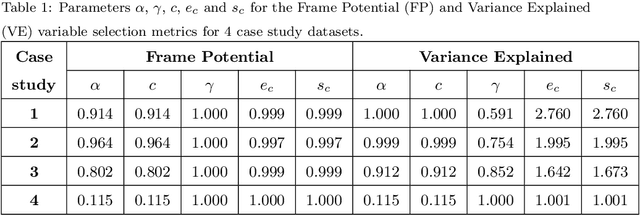
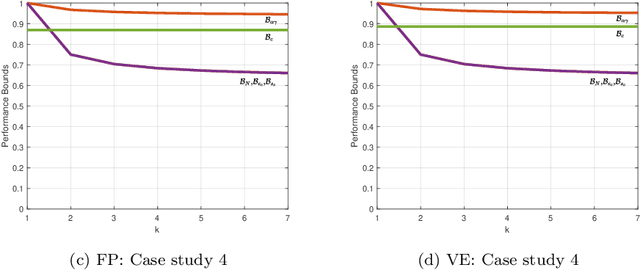
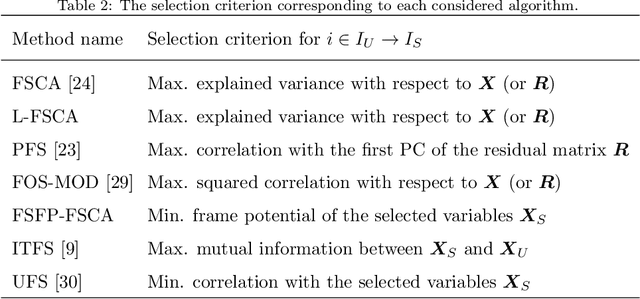
Dimensionality reduction is a important step in the development of scalable and interpretable data-driven models, especially when there are a large number of candidate variables. This paper focuses on unsupervised variable selection based dimensionality reduction, and in particular on unsupervised greedy selection methods, which have been proposed by various researchers as computationally tractable approximations to optimal subset selection. These methods are largely distinguished from each other by the selection criterion adopted, which include squared correlation, variance explained, mutual information and frame potential. Motivated by the absence in the literature of a systematic comparison of these different methods, we present a critical evaluation of seven unsupervised greedy variable selection algorithms considering both simulated and real world case studies. We also review the theoretical results that provide performance guarantees and enable efficient implementations for certain classes of greedy selection function, related to the concept of submodularity. Furthermore, we introduce and evaluate for the first time, a lazy implementation of the variance explained based forward selection component analysis (FSCA) algorithm. Our experimental results show that: (1) variance explained and mutual information based selection methods yield smaller approximation errors than frame potential; (2) the lazy FSCA implementation has similar performance to FSCA, while being an order of magnitude faster to compute, making it the algorithm of choice for unsupervised variable selection.