 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCIRO7.2: A Material Network with Circularity of -7.2 and Reinforcement-Learning-Controlled Robotic Disassembler
Jun 13, 2025The competition over natural reserves of minerals is expected to increase in part because of the linear-economy paradigm based on take-make-dispose. Simultaneously, the linear economy considers end-of-use products as waste rather than as a resource, which results in large volumes of waste whose management remains an unsolved problem. Since a transition to a circular economy can mitigate these open issues, in this paper we begin by enhancing the notion of circularity based on compartmental dynamical thermodynamics, namely, $\lambda$, and then, we model a thermodynamical material network processing a batch of 2 solid materials of criticality coefficients of 0.1 and 0.95, with a robotic disassembler compartment controlled via reinforcement learning (RL), and processing 2-7 kg of materials. Subsequently, we focused on the design of the robotic disassembler compartment using state-of-the-art RL algorithms and assessing the algorithm performance with respect to $\lambda$ (Fig. 1). The highest circularity is -2.1 achieved in the case of disassembling 2 parts of 1 kg each, whereas it reduces to -7.2 in the case of disassembling 4 parts of 1 kg each contained inside a chassis of 3 kg. Finally, a sensitivity analysis highlighted that the impact on $\lambda$ of the performance of an RL controller has a positive correlation with the quantity and the criticality of the materials to be disassembled. This work also gives the principles of the emerging research fields indicated as circular intelligence and robotics (CIRO). Source code is publicly available.
CiRL: Open-Source Environments for Reinforcement Learning in Circular Economy and Net Zero
May 24, 2025The demand of finite raw materials will keep increasing as they fuel modern society. Simultaneously, solutions for stopping carbon emissions in the short term are not available, thus making the net zero target extremely challenging to achieve at scale. The circular economy (CE) paradigm is gaining attention as a solution to address climate change and the uncertainties of supplies of critical materials. Hence, in this paper, we introduce CiRL, a deep reinforcement learning (DRL) library of environments focused on the circularity of both solid and fluid materials. The integration of DRL into the design of material circularity is possible thanks to the formalism of thermodynamical material networks, which is underpinned by compartmental dynamical thermodynamics. Along with the focus on circularity, this library has three more features: the new CE-oriented environments are in the state-space form, which is typically used in dynamical systems analysis and control designs; it is based on a state-of-the-art Python library of DRL algorithms, namely, Stable-Baselines3; and it is developed in Google Colaboratory to be accessible to researchers from different disciplines and backgrounds as is often the case for circular economy researchers and engineers. CiRL is publicly available.
Wearable Haptics for a Marionette-inspired Teleoperation of Highly Redundant Robotic Systems
Mar 20, 2025The teleoperation of complex, kinematically redundant robots with loco-manipulation capabilities represents a challenge for human operators, who have to learn how to operate the many degrees of freedom of the robot to accomplish a desired task. In this context, developing an easy-to-learn and easy-to-use human-robot interface is paramount. Recent works introduced a novel teleoperation concept, which relies on a virtual physical interaction interface between the human operator and the remote robot equivalent to a "Marionette" control, but whose feedback was limited to only visual feedback on the human side. In this paper, we propose extending the "Marionette" interface by adding a wearable haptic interface to cope with the limitations given by the previous works. Leveraging the additional haptic feedback modality, the human operator gains full sensorimotor control over the robot, and the awareness about the robot's response and interactions with the environment is greatly improved. We evaluated the proposed interface and the related teleoperation framework with naive users, assessing the teleoperation performance and the user experience with and without haptic feedback. The conducted experiments consisted in a loco-manipulation mission with the CENTAURO robot, a hybrid leg-wheel quadruped with a humanoid dual-arm upper body.
* 7 pages, 8 figures
Optimization-Driven Design of Monolithic Soft-Rigid Grippers
Dec 10, 2024
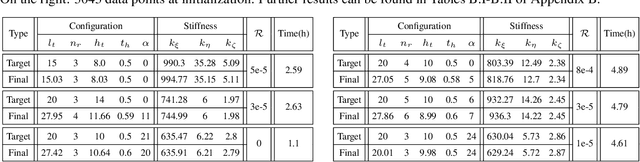
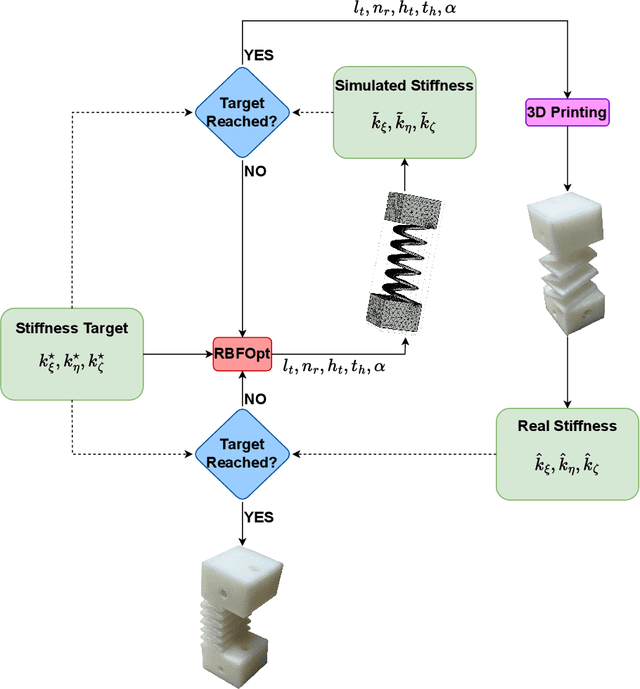
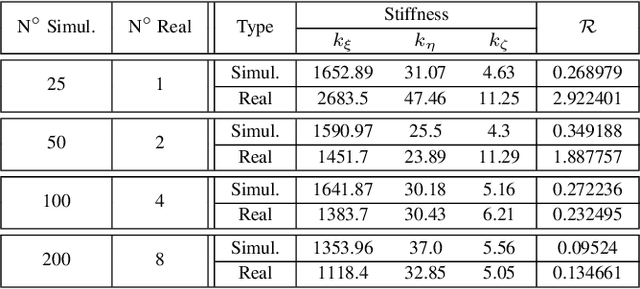
Sim-to-real transfer remains a significant challenge in soft robotics due to the unpredictability introduced by common manufacturing processes such as 3D printing and molding. These processes often result in deviations from simulated designs, requiring multiple prototypes before achieving a functional system. In this study, we propose a novel methodology to address these limitations by combining advanced rapid prototyping techniques and an efficient optimization strategy. Firstly, we employ rapid prototyping methods typically used for rigid structures, leveraging their precision to fabricate compliant components with reduced manufacturing errors. Secondly, our optimization framework minimizes the need for extensive prototyping, significantly reducing the iterative design process. The methodology enables the identification of stiffness parameters that are more practical and achievable within current manufacturing capabilities. The proposed approach demonstrates a substantial improvement in the efficiency of prototype development while maintaining the desired performance characteristics. This work represents a step forward in bridging the sim-to-real gap in soft robotics, paving the way towards a faster and more reliable deployment of soft robotic systems.
A Unification Between Deep-Learning Vision, Compartmental Dynamical Thermodynamics, and Robotic Manipulation for a Circular Economy
May 23, 2024The shift from a linear to a circular economy has the potential to simultaneously reduce uncertainties of material supplies and waste generation. To date, the development of robotic and, more generally, autonomous systems have been rarely integrated into circular economy implementation strategies. In this review, we merge deep-learning vision, compartmental dynamical thermodynamics, and robotic manipulation into a theoretically-coherent physics-based research framework to lay the foundations of circular flow designs of materials, and hence, to speed-up the transition from linearity to circularity. Then, we discuss opportunities for robotics in circular economy.