 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Twin Delayed Deep Deterministic Policy Gradient Algorithm for Autonomous Ground Vehicle Navigation via Digital Twin Perception Awareness
Mar 22, 2024Autonomous ground vehicle (UGV) navigation has the potential to revolutionize the transportation system by increasing accessibility to disabled people, ensure safety and convenience of use. However, UGV requires extensive and efficient testing and evaluation to ensure its acceptance for public use. This testing are mostly done in a simulator which result to sim2real transfer gap. In this paper, we propose a digital twin perception awareness approach for the control of robot navigation without prior creation of the virtual environment (VT) environment state. To achieve this, we develop a twin delayed deep deterministic policy gradient (TD3) algorithm that ensures collision avoidance and goal-based path planning. We demonstrate the performance of our approach on different environment dynamics. We show that our approach is capable of efficiently avoiding collision with obstacles and navigating to its desired destination, while at the same time safely avoids obstacles using the information received from the LIDAR sensor mounted on the robot. Our approach bridges the gap between sim-to-real transfer and contributes to the adoption of UGVs in real world. We validate our approach in simulation and a real-world application in an office space.
Fixed-time Adaptive Neural Control for Physical Human-Robot Collaboration with Time-Varying Workspace Constraints
Mar 04, 2023



Physical human-robot collaboration (pHRC) requires both compliance and safety guarantees since robots coordinate with human actions in a shared workspace. This paper presents a novel fixed-time adaptive neural control methodology for handling time-varying workspace constraints that occur in physical human-robot collaboration while also guaranteeing compliance during intended force interactions. The proposed methodology combines the benefits of compliance control, time-varying integral barrier Lyapunov function (TVIBLF) and fixed-time techniques, which not only achieve compliance during physical contact with human operators but also guarantee time-varying workspace constraints and fast tracking error convergence without any restriction on the initial conditions. Furthermore, a neural adaptive control law is designed to compensate for the unknown dynamics and disturbances of the robot manipulator such that the proposed control framework is overall fixed-time converged and capable of online learning without any prior knowledge of robot dynamics and disturbances. The proposed approach is finally validated on a simulated two-link robot manipulator. Simulation results show that the proposed controller is superior in the sense of both tracking error and convergence time compared with the existing barrier Lyapunov functions based controllers, while simultaneously guaranteeing compliance and safety.
Fixed-time Integral Sliding Mode Control for Admittance Control of a Robot Manipulator
Aug 09, 2022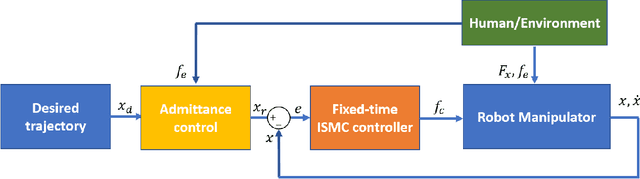

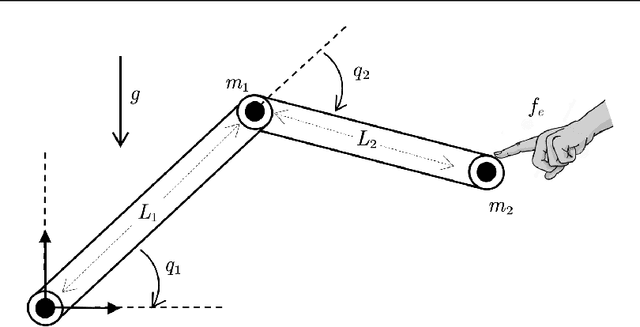
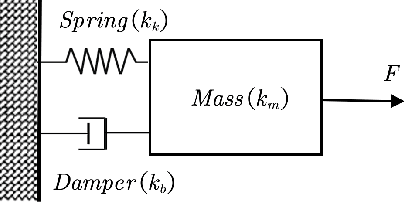
This paper proposes a novel fixed-time integral sliding mode controller for admittance control to enhance physical human-robot collaboration. The proposed method combines the benefits of compliance to external forces of admittance control and high robustness to uncertainties of integral sliding mode control (ISMC), such that the system can collaborate with a human partner in an uncertain environment effectively. Firstly, a fixed-time sliding surface is applied in the ISMC to make the tracking error of the system converge within a fixed-time regardless of the initial condition. Then, a fixed-time backstepping controller (BSP) is integrated into the ISMC as the nominal controller to realize global fixed-time convergence. Furthermore, to overcome the singularity problem, a non-singular fixed-time sliding surface is designed and integrated into the controller, which is useful for practical application. Finally, the proposed controller is validated for a two-link robot manipulator with uncertainties and external human forces. The results show that the proposed controller is superior in the sense of both tracking error and convergence time, and at the same time, can comply with human motion in a shared workspace.
Adaptive Admittance Control for Safety-Critical Physical Human Robot Collaboration
Aug 09, 2022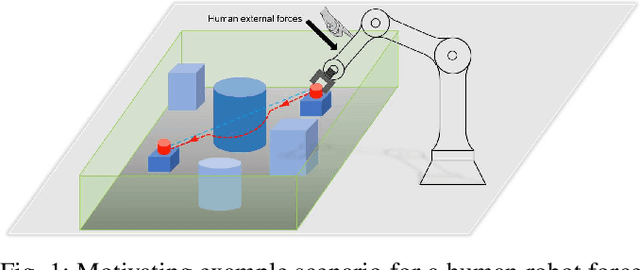
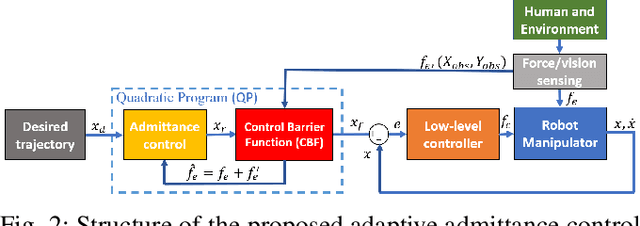
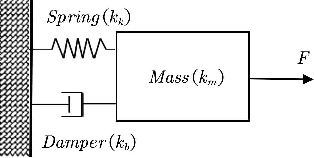
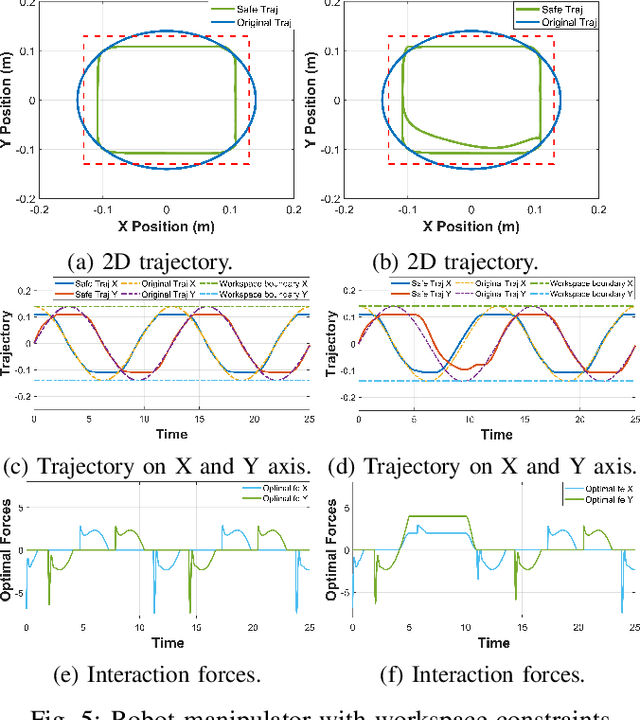
Physical human-robot collaboration requires strict safety guarantees since robots and humans work in a shared workspace. This letter presents a novel control framework to handle safety-critical position-based constraints for human-robot physical interaction. The proposed methodology is based on admittance control, exponential control barrier functions (ECBFs) and quadratic program (QP) to achieve compliance during the force interaction between human and robot, while simultaneously guaranteeing safety constraints. In particular, the formulation of admittance control is rewritten as a second-order nonlinear control system, and the interaction forces between humans and robots are regarded as the control input. A virtual force feedback for admittance control is provided in real-time by using the ECBFs-QP framework as a compensator of the external human forces. A safe trajectory is therefore derived from the proposed adaptive admittance control scheme for a low-level controller to track. The innovation of the proposed approach is that the proposed controller will enable the robot to comply with human forces with natural fluidity without violation of any safety constraints even in cases where human external forces incidentally force the robot to violate constraints. The effectiveness of our approach is demonstrated in simulation studies on a two-link planar robot manipulator.
Non-local Graph Convolutional Network for joint Activity Recognition and Motion Prediction
Aug 03, 2021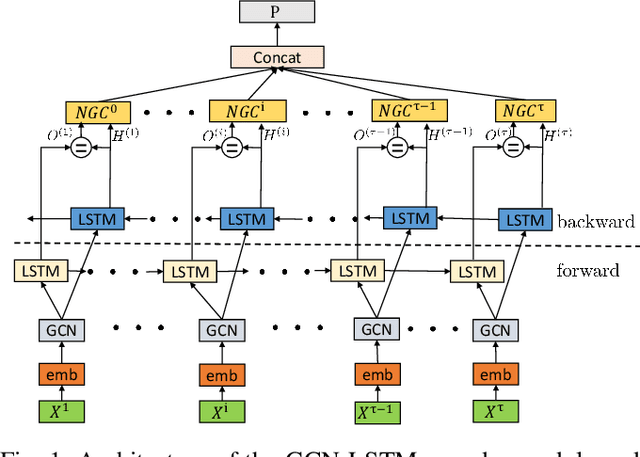

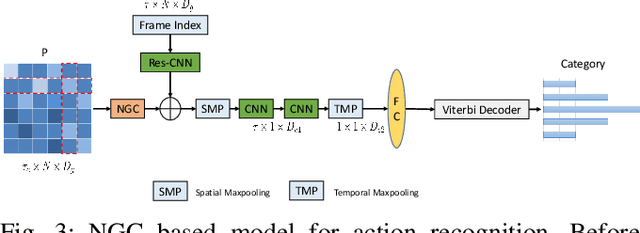
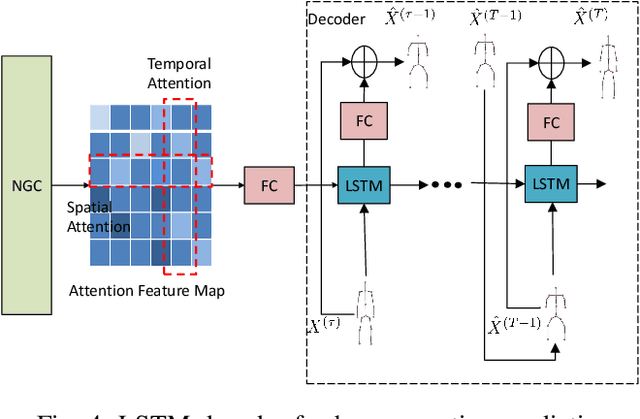
3D skeleton-based motion prediction and activity recognition are two interwoven tasks in human behaviour analysis. In this work, we propose a motion context modeling methodology that provides a new way to combine the advantages of both graph convolutional neural networks and recurrent neural networks for joint human motion prediction and activity recognition. Our approach is based on using an LSTM encoder-decoder and a non-local feature extraction attention mechanism to model the spatial correlation of human skeleton data and temporal correlation among motion frames. The proposed network can easily include two output branches, one for Activity Recognition and one for Future Motion Prediction, which can be jointly trained for enhanced performance. Experimental results on Human 3.6M, CMU Mocap and NTU RGB-D datasets show that our proposed approach provides the best prediction capability among baseline LSTM-based methods, while achieving comparable performance to other state-of-the-art methods.
Efficient Marginal Likelihood Computation for Gaussian Process Regression
Oct 29, 2011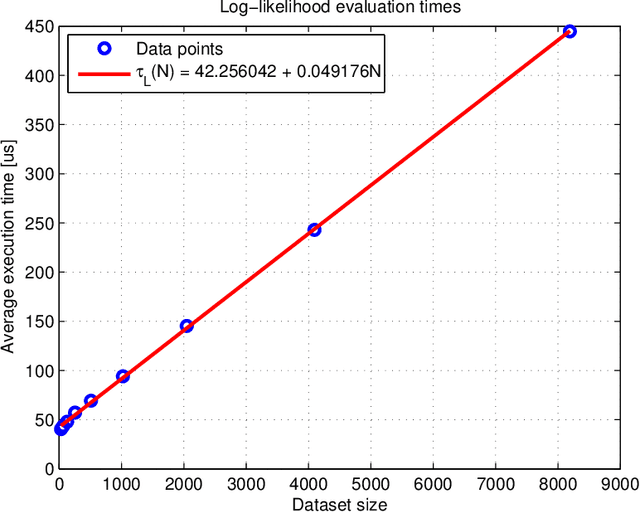
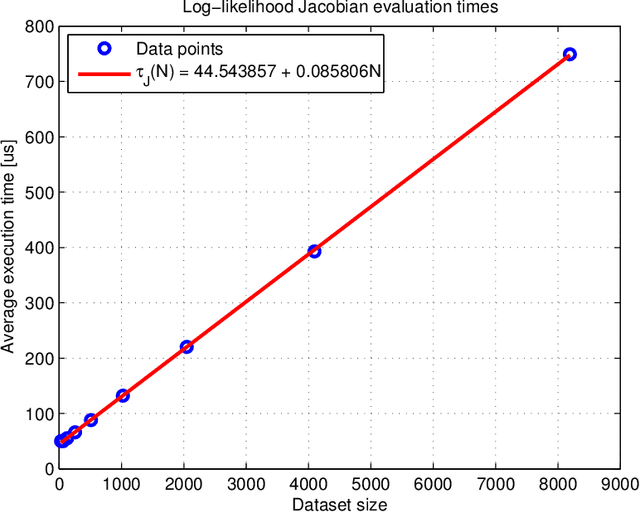

In a Bayesian learning setting, the posterior distribution of a predictive model arises from a trade-off between its prior distribution and the conditional likelihood of observed data. Such distribution functions usually rely on additional hyperparameters which need to be tuned in order to achieve optimum predictive performance; this operation can be efficiently performed in an Empirical Bayes fashion by maximizing the posterior marginal likelihood of the observed data. Since the score function of this optimization problem is in general characterized by the presence of local optima, it is necessary to resort to global optimization strategies, which require a large number of function evaluations. Given that the evaluation is usually computationally intensive and badly scaled with respect to the dataset size, the maximum number of observations that can be treated simultaneously is quite limited. In this paper, we consider the case of hyperparameter tuning in Gaussian process regression. A straightforward implementation of the posterior log-likelihood for this model requires O(N^3) operations for every iteration of the optimization procedure, where N is the number of examples in the input dataset. We derive a novel set of identities that allow, after an initial overhead of O(N^3), the evaluation of the score function, as well as the Jacobian and Hessian matrices, in O(N) operations. We prove how the proposed identities, that follow from the eigendecomposition of the kernel matrix, yield a reduction of several orders of magnitude in the computation time for the hyperparameter optimization problem. Notably, the proposed solution provides computational advantages even with respect to state of the art approximations that rely on sparse kernel matrices.