 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePhysiology and Anatomy Aware Inverse Inference of Myocardial Infarction for Cardiac Digital Twin
May 21, 2026Accurate localization of myocardial infarction is essential for risk stratification. While LGE-MRI remains the gold standard, it is resource-intensive. Integrating cine MRI with ECG enables a more detailed representation of infarct properties. Existing inverse MI inference methods overlook realistic scar morphology and cardiac repolarization, reducing sensitivity to subtle ECG variations and interpretability of infarct-induced electrophysiological changes. In this paper, we propose a novel framework for noninvasive MI localization using cardiac digital twins. To bridge the domain gap between simulation and reality, we introduce an anatomy-aware stochastic infarct synthesis strategy to synthesize realistic, irregular scars with border zones, mimicking ischemic transmural progression. We then construct a virtual cohort to simulate QRS-T waveforms, capturing both depolarization and repolarization dynamics. Furthermore, we design a Physiology and Anatomy Aware Network (PAA-Net) that jointly encodes 3D myocardial geometry and multi-lead ECGs to infer infarct areas with varying localizations, sizes, spatial extents, and transmuralities. Experimental results demonstrate that our framework significantly outperforms existing methods in inverse inference, achieving Dice scores of 0.7391 and 0.5503 for scar and border zone segmentation, respectively, while further enhancing the interpretability of the ECG-infarct relationship. Our code will be released upon acceptance.
Safe and Non-Conservative Contingency Planning for Autonomous Vehicles via Online Learning-Based Reachable Set Barriers
Sep 09, 2025Autonomous vehicles must navigate dynamically uncertain environments while balancing the safety and driving efficiency. This challenge is exacerbated by the unpredictable nature of surrounding human-driven vehicles (HVs) and perception inaccuracies, which require planners to adapt to evolving uncertainties while maintaining safe trajectories. Overly conservative planners degrade driving efficiency, while deterministic approaches may encounter serious issues and risks of failure when faced with sudden and unexpected maneuvers. To address these issues, we propose a real-time contingency trajectory optimization framework in this paper. By employing event-triggered online learning of HV control-intent sets, our method dynamically quantifies multi-modal HV uncertainties and refines the forward reachable set (FRS) incrementally. Crucially, we enforce invariant safety through FRS-based barrier constraints that ensure safety without reliance on accurate trajectory prediction of HVs. These constraints are embedded in contingency trajectory optimization and solved efficiently through consensus alternative direction method of multipliers (ADMM). The system continuously adapts to the uncertainties in HV behaviors, preserving feasibility and safety without resorting to excessive conservatism. High-fidelity simulations on highway and urban scenarios, as well as a series of real-world experiments demonstrate significant improvements in driving efficiency and passenger comfort while maintaining safety under uncertainty. The project page is available at https://pathetiue.github.io/frscp.github.io/.
Quantum Conflict Measurement in Decision Making for Out-of-Distribution Detection
May 10, 2025Quantum Dempster-Shafer Theory (QDST) uses quantum interference effects to derive a quantum mass function (QMF) as a fuzzy metric type from information obtained from various data sources. In addition, QDST uses quantum parallel computing to speed up computation. Nevertheless, the effective management of conflicts between multiple QMFs in QDST is a challenging question. This work aims to address this problem by proposing a Quantum Conflict Indicator (QCI) that measures the conflict between two QMFs in decision-making. Then, the properties of the QCI are carefully investigated. The obtained results validate its compliance with desirable conflict measurement properties such as non-negativity, symmetry, boundedness, extreme consistency and insensitivity to refinement. We then apply the proposed QCI in conflict fusion methods and compare its performance with several commonly used fusion approaches. This comparison demonstrates the superiority of the QCI-based conflict fusion method. Moreover, the Class Description Domain Space (C-DDS) and its optimized version, C-DDS+ by utilizing the QCI-based fusion method, are proposed to address the Out-of-Distribution (OOD) detection task. The experimental results show that the proposed approach gives better OOD performance with respect to several state-of-the-art baseline OOD detection methods. Specifically, it achieves an average increase in Area Under the Receiver Operating Characteristic Curve (AUC) of 1.2% and a corresponding average decrease in False Positive Rate at 95% True Negative Rate (FPR95) of 5.4% compared to the optimal baseline method.
Online Robot Motion Planning Methodology Guided by Group Social Proxemics Feature
Feb 07, 2025



Nowadays robot is supposed to demonstrate human-like perception, reasoning and behavior pattern in social or service application. However, most of the existing motion planning methods are incompatible with above requirement. A potential reason is that the existing navigation algorithms usually intend to treat people as another kind of obstacle, and hardly take the social principle or awareness into consideration. In this paper, we attempt to model the proxemics of group and blend it into the scenario perception and navigation of robot. For this purpose, a group clustering method considering both social relevance and spatial confidence is introduced. It can enable robot to identify individuals and divide them into groups. Next, we propose defining the individual proxemics within magnetic dipole model, and further established the group proxemics and scenario map through vector-field superposition. On the basis of the group clustering and proxemics modeling, we present the method to obtain the optimal observation positions (OOPs) of group. Once the OOPs grid and scenario map are established, a heuristic path is employed to generate path that guide robot cruising among the groups for interactive purpose. A series of experiments are conducted to validate the proposed methodology on the practical robot, the results have demonstrated that our methodology has achieved promising performance on group recognition accuracy and path-generation efficiency. This concludes that the group awareness evolved as an important module to make robot socially behave in the practical scenario.
Fixed-time Adaptive Neural Control for Physical Human-Robot Collaboration with Time-Varying Workspace Constraints
Mar 04, 2023



Physical human-robot collaboration (pHRC) requires both compliance and safety guarantees since robots coordinate with human actions in a shared workspace. This paper presents a novel fixed-time adaptive neural control methodology for handling time-varying workspace constraints that occur in physical human-robot collaboration while also guaranteeing compliance during intended force interactions. The proposed methodology combines the benefits of compliance control, time-varying integral barrier Lyapunov function (TVIBLF) and fixed-time techniques, which not only achieve compliance during physical contact with human operators but also guarantee time-varying workspace constraints and fast tracking error convergence without any restriction on the initial conditions. Furthermore, a neural adaptive control law is designed to compensate for the unknown dynamics and disturbances of the robot manipulator such that the proposed control framework is overall fixed-time converged and capable of online learning without any prior knowledge of robot dynamics and disturbances. The proposed approach is finally validated on a simulated two-link robot manipulator. Simulation results show that the proposed controller is superior in the sense of both tracking error and convergence time compared with the existing barrier Lyapunov functions based controllers, while simultaneously guaranteeing compliance and safety.
Learning the Network of Graphs for Graph Neural Networks
Oct 08, 2022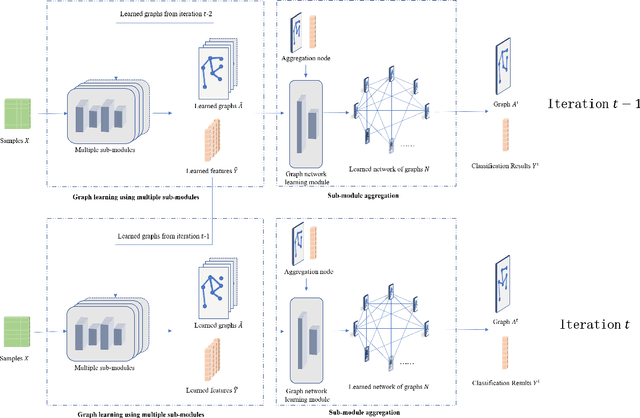
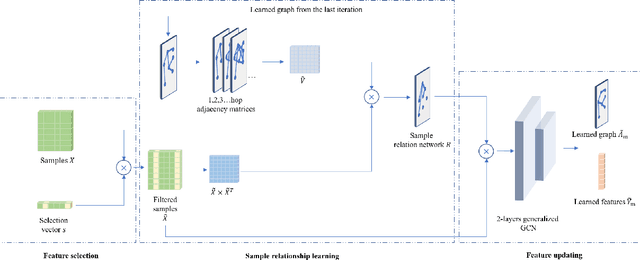
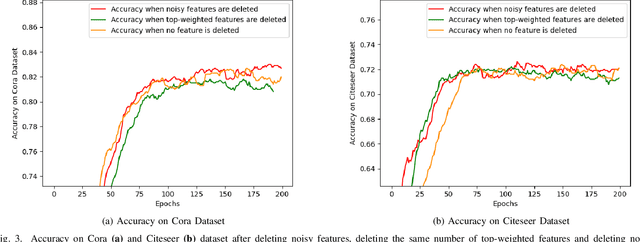
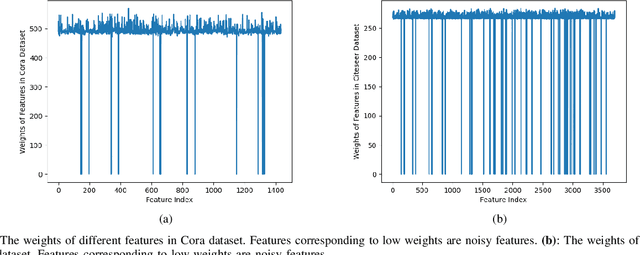
Graph neural networks (GNNs) have achieved great success in many scenarios with graph-structured data. However, in many real applications, there are three issues when applying GNNs: graphs are unknown, nodes have noisy features, and graphs contain noisy connections. Aiming at solving these problems, we propose a new graph neural network named as GL-GNN. Our model includes multiple sub-modules, each sub-module selects important data features and learn the corresponding key relation graph of data samples when graphs are unknown. GL-GNN further obtains the network of graphs by learning the network of sub-modules. The learned graphs are further fused using an aggregation method over the network of graphs. Our model solves the first issue by simultaneously learning multiple relation graphs of data samples as well as a relation network of graphs, and solves the second and the third issue by selecting important data features as well as important data sample relations. We compare our method with 14 baseline methods on seven datasets when the graph is unknown and 11 baseline methods on two datasets when the graph is known. The results show that our method achieves better accuracies than the baseline methods and is capable of selecting important features and graph edges from the dataset. Our code will be publicly available at \url{https://github.com/Looomo/GL-GNN}.
Low-resolution Human Pose Estimation
Sep 19, 2021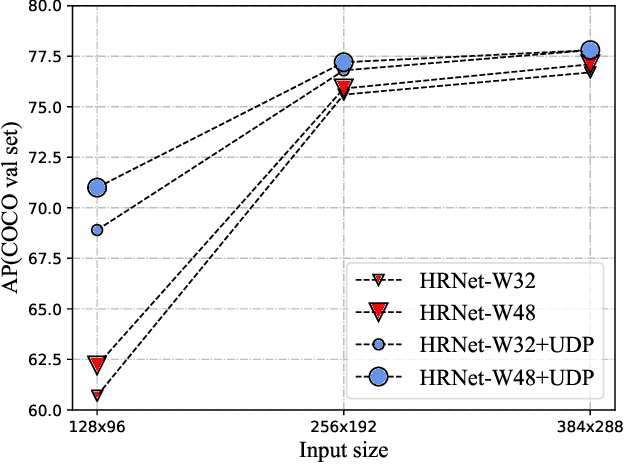
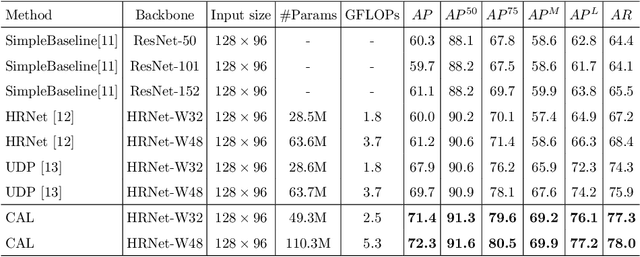
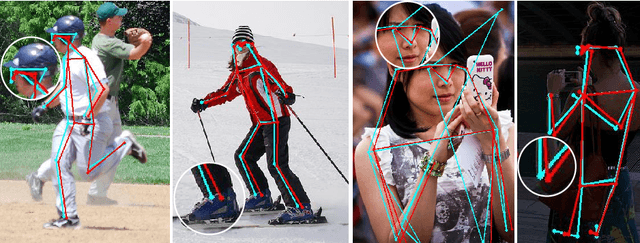
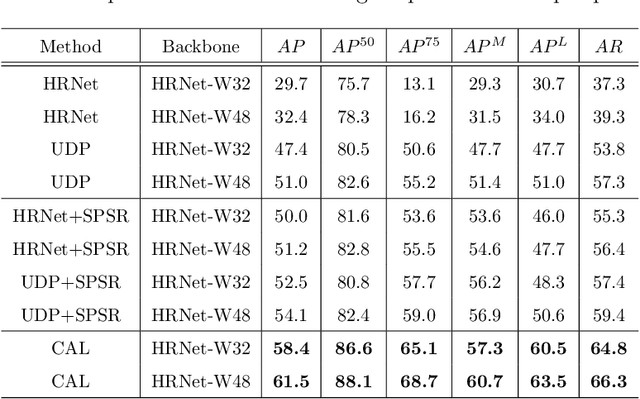
Human pose estimation has achieved significant progress on images with high imaging resolution. However, low-resolution imagery data bring nontrivial challenges which are still under-studied. To fill this gap, we start with investigating existing methods and reveal that the most dominant heatmap-based methods would suffer more severe model performance degradation from low-resolution, and offset learning is an effective strategy. Established on this observation, in this work we propose a novel Confidence-Aware Learning (CAL) method which further addresses two fundamental limitations of existing offset learning methods: inconsistent training and testing, decoupled heatmap and offset learning. Specifically, CAL selectively weighs the learning of heatmap and offset with respect to ground-truth and most confident prediction, whilst capturing the statistical importance of model output in mini-batch learning manner. Extensive experiments conducted on the COCO benchmark show that our method outperforms significantly the state-of-the-art methods for low-resolution human pose estimation.
Nearest Neighborhood-Based Deep Clustering for Source Data-absent Unsupervised Domain Adaptation
Aug 03, 2021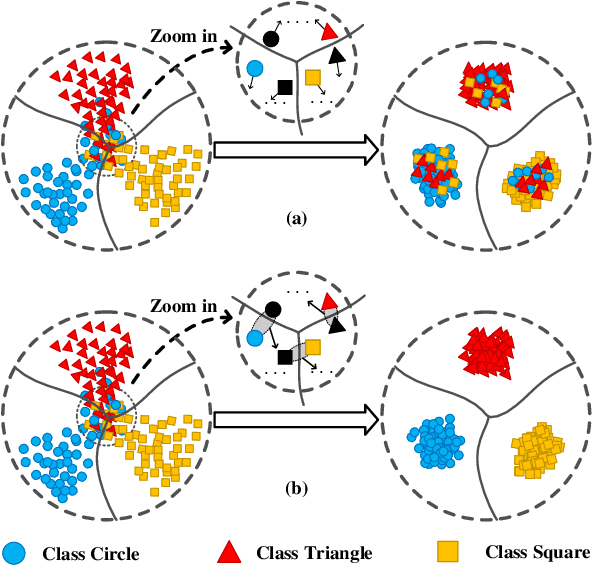
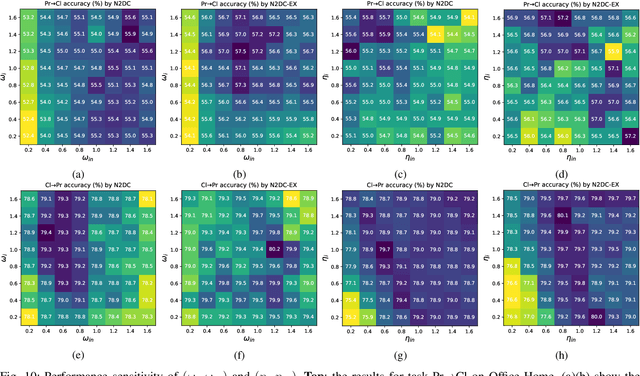
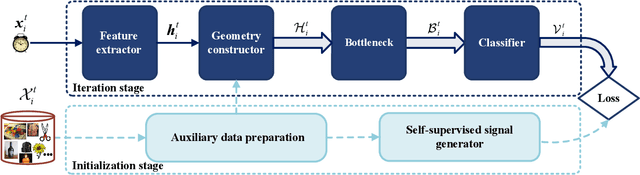
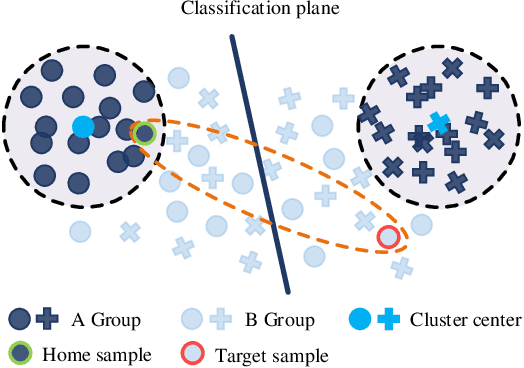
In the classic setting of unsupervised domain adaptation (UDA), the labeled source data are available in the training phase. However, in many real-world scenarios, owing to some reasons such as privacy protection and information security, the source data is inaccessible, and only a model trained on the source domain is available. This paper proposes a novel deep clustering method for this challenging task. Aiming at the dynamical clustering at feature-level, we introduce extra constraints hidden in the geometric structure between data to assist the process. Concretely, we propose a geometry-based constraint, named semantic consistency on the nearest neighborhood (SCNNH), and use it to encourage robust clustering. To reach this goal, we construct the nearest neighborhood for every target data and take it as the fundamental clustering unit by building our objective on the geometry. Also, we develop a more SCNNH-compliant structure with an additional semantic credibility constraint, named semantic hyper-nearest neighborhood (SHNNH). After that, we extend our method to this new geometry. Extensive experiments on three challenging UDA datasets indicate that our method achieves state-of-the-art results. The proposed method has significant improvement on all datasets (as we adopt SHNNH, the average accuracy increases by over 3.0% on the large-scaled dataset). Code is available at https://github.com/tntek/N2DCX.
Person image generation with semantic attention network for person re-identification
Aug 18, 2020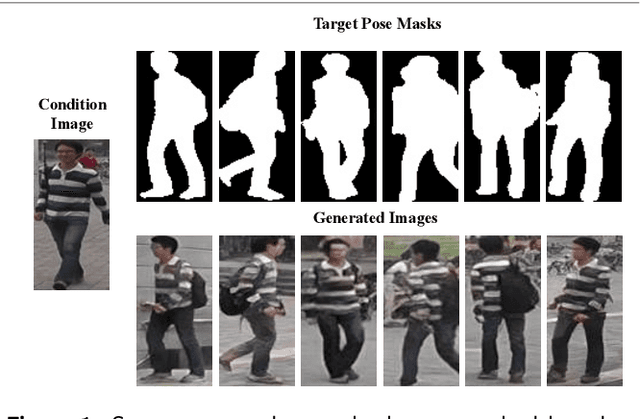
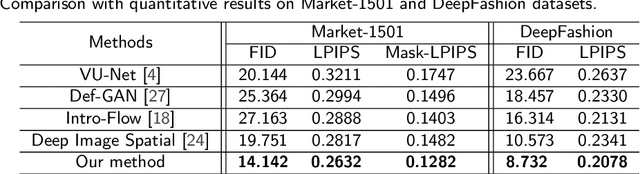
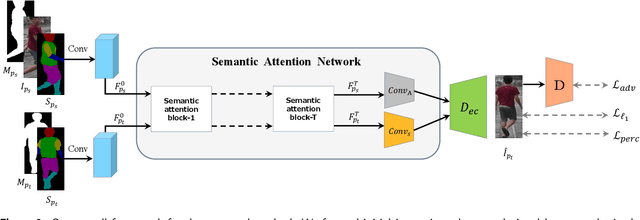
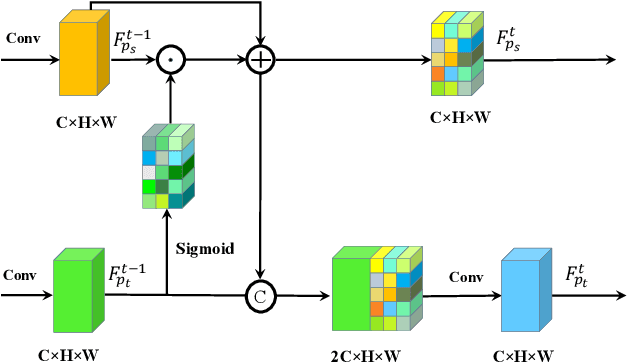
Pose variation is one of the key factors which prevents the network from learning a robust person re-identification (Re-ID) model. To address this issue, we propose a novel person pose-guided image generation method, which is called the semantic attention network. The network consists of several semantic attention blocks, where each block attends to preserve and update the pose code and the clothing textures. The introduction of the binary segmentation mask and the semantic parsing is important for seamlessly stitching foreground and background in the pose-guided image generation. Compared with other methods, our network can characterize better body shape and keep clothing attributes, simultaneously. Our synthesized image can obtain better appearance and shape consistency related to the original image. Experimental results show that our approach is competitive with respect to both quantitative and qualitative results on Market-1501 and DeepFashion. Furthermore, we conduct extensive evaluations by using person re-identification (Re-ID) systems trained with the pose-transferred person based augmented data. The experiment shows that our approach can significantly enhance the person Re-ID accuracy.
G-image Segmentation: Similarity-preserving Fuzzy C-Means with Spatial Information Constraint in Wavelet Space
Jul 01, 2020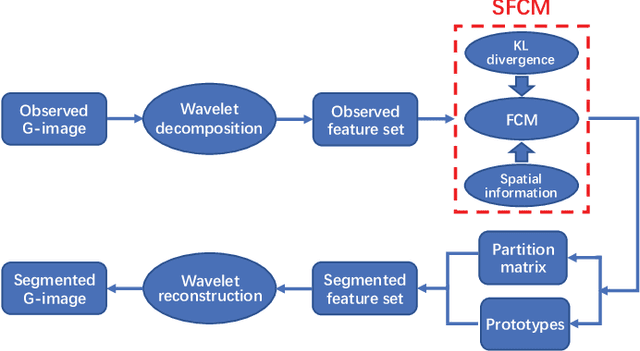
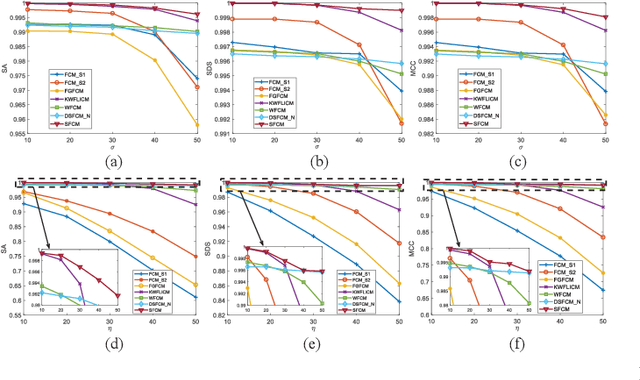
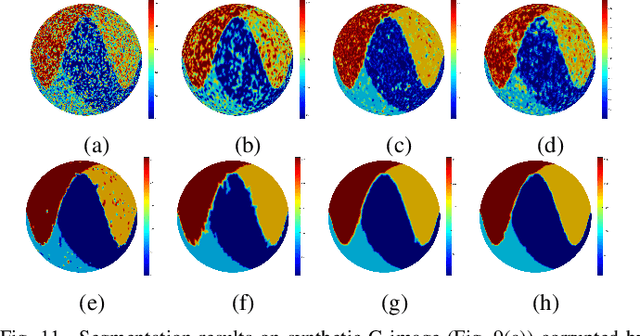
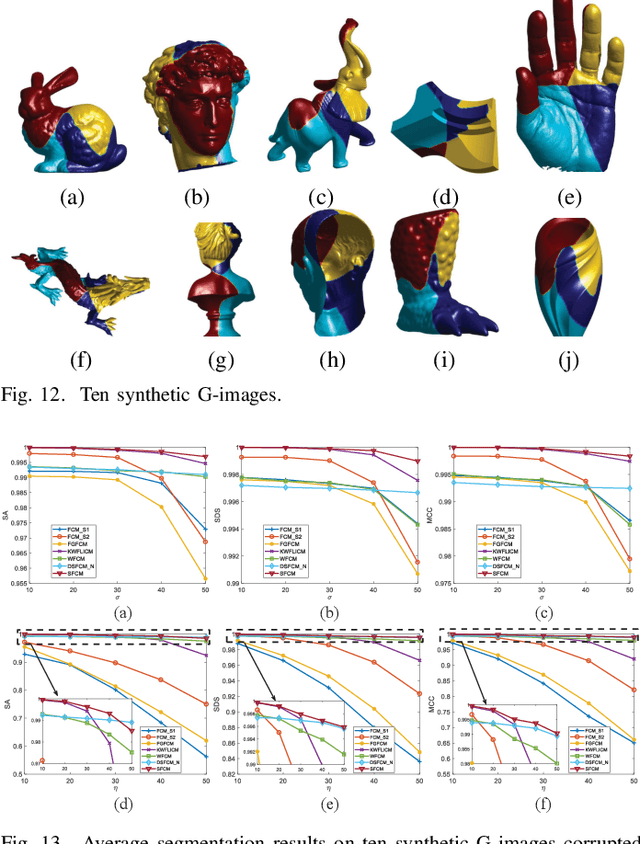
G-images refer to image data defined on irregular graph domains. This work elaborates a similarity-preserving Fuzzy C-Means (FCM) algorithm for G-image segmentation and aims to develop techniques and tools for segmenting G-images. To preserve the membership similarity between an arbitrary image pixel and its neighbors, a Kullback-Leibler divergence term on membership partition is introduced as a part of FCM. As a result, similarity-preserving FCM is developed by considering spatial information of image pixels for its robustness enhancement. Due to superior characteristics of a wavelet space, the proposed FCM is performed in this space rather than Euclidean one used in conventional FCM to secure its high robustness. Experiments on synthetic and real-world G-images demonstrate that it indeed achieves higher robustness and performance than the state-of-the-art FCM algorithms. Moreover, it requires less computation than most of them.