 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline Robot Motion Planning Methodology Guided by Group Social Proxemics Feature
Feb 07, 2025Nowadays robot is supposed to demonstrate human-like perception, reasoning and behavior pattern in social or service application. However, most of the existing motion planning methods are incompatible with above requirement. A potential reason is that the existing navigation algorithms usually intend to treat people as another kind of obstacle, and hardly take the social principle or awareness into consideration. In this paper, we attempt to model the proxemics of group and blend it into the scenario perception and navigation of robot. For this purpose, a group clustering method considering both social relevance and spatial confidence is introduced. It can enable robot to identify individuals and divide them into groups. Next, we propose defining the individual proxemics within magnetic dipole model, and further established the group proxemics and scenario map through vector-field superposition. On the basis of the group clustering and proxemics modeling, we present the method to obtain the optimal observation positions (OOPs) of group. Once the OOPs grid and scenario map are established, a heuristic path is employed to generate path that guide robot cruising among the groups for interactive purpose. A series of experiments are conducted to validate the proposed methodology on the practical robot, the results have demonstrated that our methodology has achieved promising performance on group recognition accuracy and path-generation efficiency. This concludes that the group awareness evolved as an important module to make robot socially behave in the practical scenario.
Mechanics and Design of Metastructured Auxetic Patches with Bio-inspired Materials
Jan 08, 2025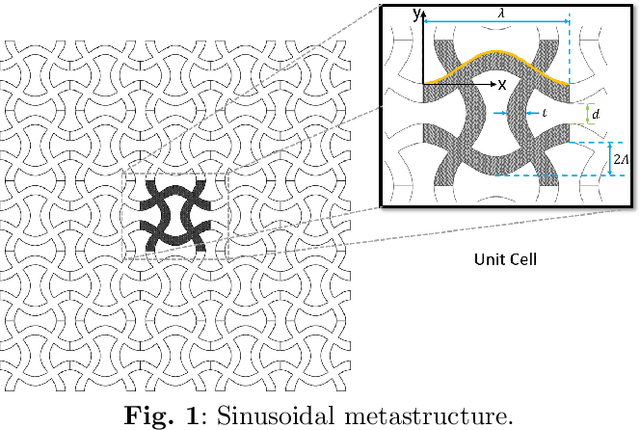
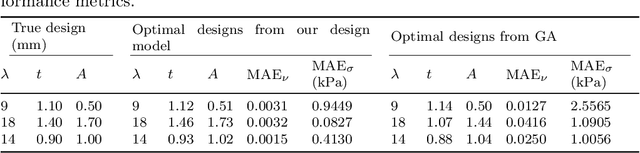
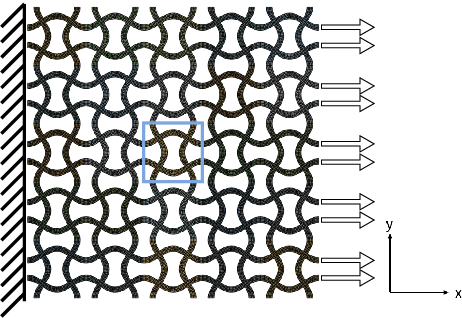
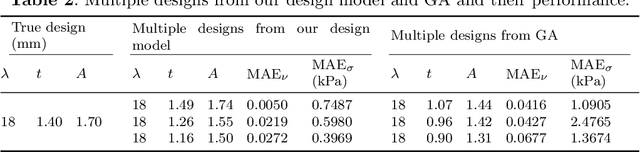
Metastructured auxetic patches, characterized by negative Poisson's ratios, offer unique mechanical properties that closely resemble the behavior of human tissues and organs. As a result, these patches have gained significant attention for their potential applications in organ repair and tissue regeneration. This study focuses on neural networks-based computational modeling of auxetic patches with a sinusoidal metastructure fabricated from silk fibroin, a bio-inspired material known for its biocompatibility and strength. The primary objective of this research is to introduce a novel, data-driven framework for patch design. To achieve this, we conducted experimental fabrication and mechanical testing to determine material properties and validate the corresponding finite element models. Finite element simulations were then employed to generate the necessary data, while greedy sampling, an active learning technique, was utilized to reduce the computational cost associated with data labeling. Two neural networks were trained to accurately predict Poisson's ratios and stresses for strains up to 15\%, respectively. Both models achieved $R^2$ scores exceeding 0.995, which indicates highly reliable predictions. Building on this, we developed a neural network-based design model capable of tailoring patch designs to achieve specific mechanical properties. This model demonstrated superior performance when compared to traditional optimization methods, such as genetic algorithms, by providing more efficient and precise design solutions. The proposed framework represents a significant advancement in the design of bio-inspired metastructures for medical applications, paving the way for future innovations in tissue engineering and regenerative medicine.