 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVisual Area Coverage with Attitude-Dependent Camera Footprints by Particle Harvesting
Paper and Code
Sep 15, 2019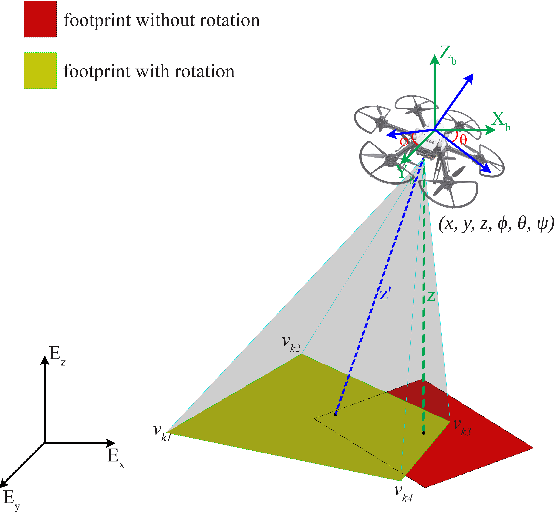

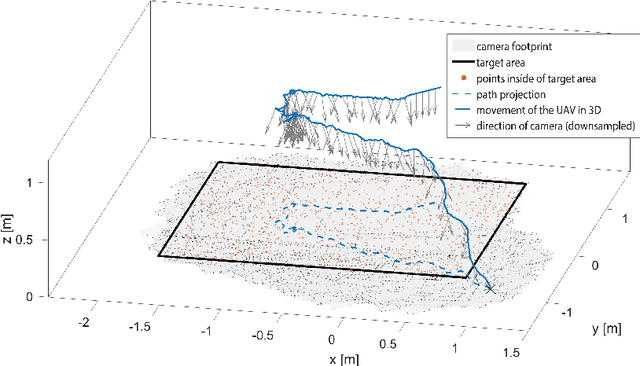
In aerial visual area coverage missions, the camera footprint changes over time based on the camera position and orientation -- a fact that complicates the whole process of coverage and path planning. This article proposes a solution to the problem of visual coverage by filling the target area with a set of randomly distributed particles and harvesting them by camera footprints. This way, high coverage is obtained at a low computational cost. In this approach, the path planner considers six degrees of freedom (DoF) for the camera movement and commands thrust and attitude references to a lower layer controller, while maximizing the covered area and coverage quality. The proposed method requires a priori information of the boundaries of the target area and can handle areas of very complex and highly non-convex geometry. The effectiveness of the approach is demonstrated in multiple simulations in terms of computational efficiency and coverage.