 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Entropy-Driven Sensor Selection in a Camera-LiDAR Particle Filter for Single-Vessel Tracking
Mar 09, 2026Robust single-vessel tracking from fixed coastal platforms is hindered by modality-specific degradations: cameras suffer from illumination and visual clutter, while LiDAR performance drops with range and intermittent returns. We present a heterogeneous multi-sensor fusion particle-filter tracker that incorporates an information-gain (entropy-reduction) adaptive sensing policy to select the most informative configuration at each fusion time bin. The approach is validated in a real maritime deployment at the CMMI Smart Marina Testbed (Ayia Napa Marina, Cyprus), using a shore-mounted 3D LiDAR and an elevated fixed camera to track a rigid inflatable boat with onboard GNSS ground truth. We compare LiDAR-only, camera-only, all-sensors, and adaptive configurations. Results show LiDAR dominates near-field accuracy, the camera sustains longer-range coverage when LiDAR becomes unavailable, and the adaptive policy achieves a favorable accuracy-continuity trade-off by switching modalities based on information gain. By avoiding continuous multi-stream processing, the adaptive configuration provides a practical baseline for resilient and resource-aware maritime surveillance.
Multimodal and Multiview Deep Fusion for Autonomous Marine Navigation
May 02, 2025



We propose a cross attention transformer based method for multimodal sensor fusion to build a birds eye view of a vessels surroundings supporting safer autonomous marine navigation. The model deeply fuses multiview RGB and long wave infrared images with sparse LiDAR point clouds. Training also integrates X band radar and electronic chart data to inform predictions. The resulting view provides a detailed reliable scene representation improving navigational accuracy and robustness. Real world sea trials confirm the methods effectiveness even in adverse weather and complex maritime settings.
Optimal Distributed Multi-Robot Communication-Aware Trajectory Planning using Alternating Direction Method of Multipliers
Aug 09, 2024This paper presents a distributed, optimal, communication-aware trajectory planning algorithm for multi-robot systems. Building on prior work, it addresses the multi-robot communication-aware trajectory planning problem using a general optimisation framework that imposes linear constraints on changes in robot positions to ensure communication performance and collision avoidance. In this paper, the optimisation problem is solved distributively by separating the communication performance constraint through an economic approach. Here, the current communication budget is distributed equally among the robots, and the robots are allowed to trade parts of their budgets with each other. The separated optimisation problem is then solved using the consensus alternating direction method of multipliers. The method was verified through simulation in an inspection task problem.
Optimal Multi-Robot Communication-Aware Trajectory Planning by Constraining the Fiedler Value
Jun 26, 2024The paper present a novel approach for the solution of the Multi-Robot Communication-Aware Trajectory Planning, which builds on a general optimisation framework where the changes in robots positions are used as decision variable, and linear constraints on the trajectories of the robots are introduced to ensure communication performance and collision avoidance. The Fiedler value is adopted as communication performance metric. The validity of the method in computing both feasible and optimal trajectories for the robots is demonstrated both in simulation and experimentally. Results show that the constraint on the Fiedler value ensures that the robot network fulfils its objective while maintaining communication connectivity at all times. Further, the paper shows that the introduction of approximations for the constraints enables a significant improvement in the computational time of the solution, which remain very close to the optimal solution.
Stochastic COLREGs Evaluation for Safe Navigation under Uncertainty
Feb 08, 2024The encounter situation between marine vessels determines how they should navigate to obey COLREGs, but time-varying and stochastic uncertainty in estimation of angles of encounter, and of closest point of approach, easily give rise to different assessment of situation at two approaching vessels. This may lead to high-risk conditions and could cause collision. This article considers decision making under uncertainty and suggests a novel method for probabilistic interpretation of vessel encounters that is explainable and provides a measure of uncertainty in the evaluation. The method is equally useful for decision support on a manned bridge as on Marine Autonomous Surface Ships (MASS) where it provides input for automated navigation. The method makes formal safety assessment and validation feasible. We obtain a resilient algorithm for machine interpretation of COLREGs under uncertainty and show its efficacy by simulations.
Autonomy for Ferries and Harbour Buses: a Collision Avoidance Perspective
Jan 06, 2023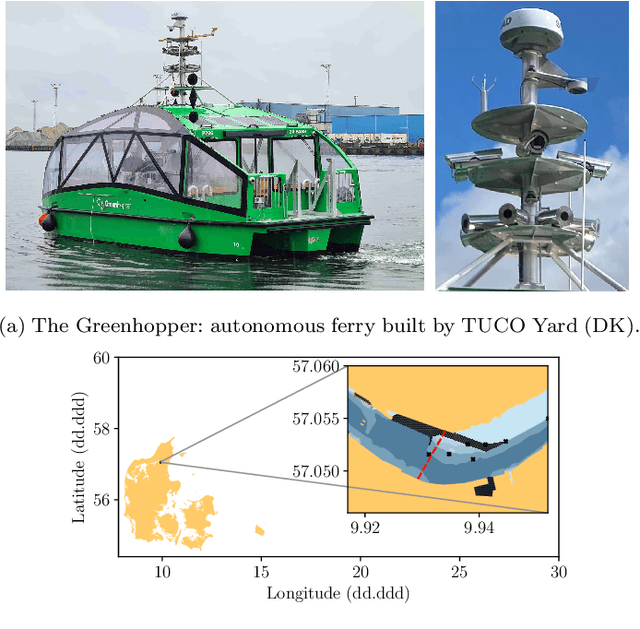
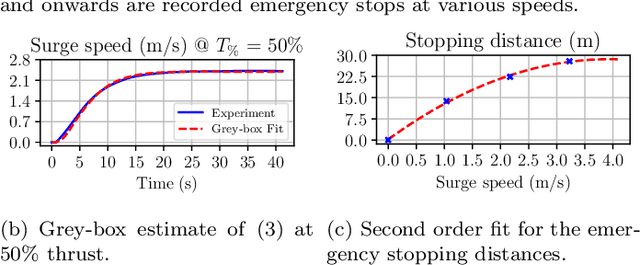
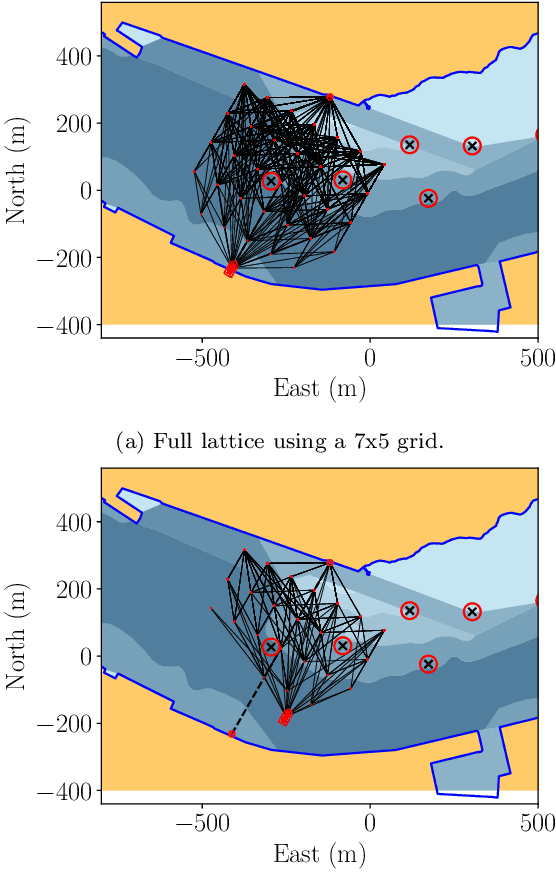
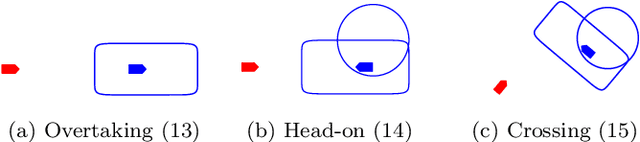
This paper provides a collision avoidance perspective to maritime autonomy, in the shift towards Maritime Autonomous Surface Ships (MASS). In particular, the paper presents the developments related to the Greenhoper, a Danish autonomous harbour bus. The collision and grounding avoidance scheme, called the Short Horizon Planner (SHP), is described and discussed in detail. Furthermore, the required autonomy stack for facilitating safe and rule-compliant collision avoidance is presented. The inherent difficulties relating to adhering to the COLREGs are outlined, highlighting some of the operational constraints and challenges within the space of autonomous ferries and harbour buses. Finally, collision and grounding avoidance is demonstrated using a simulation of the entire proposed autonomy stack.
Informed Sampling-based Collision Avoidance with Least Deviation from the Nominal Path
Oct 24, 2022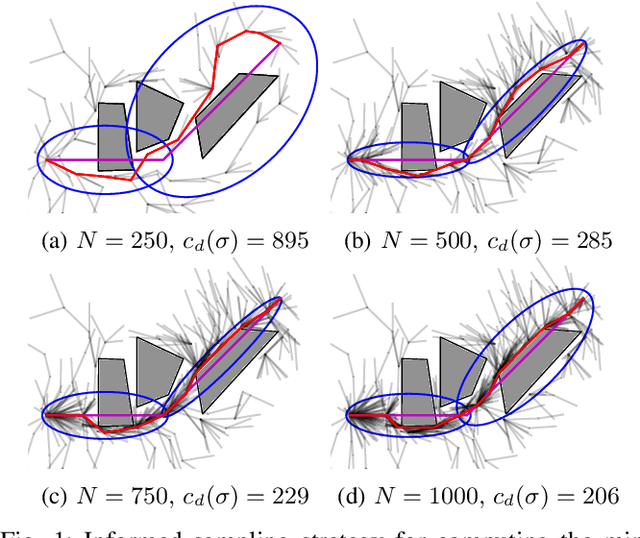
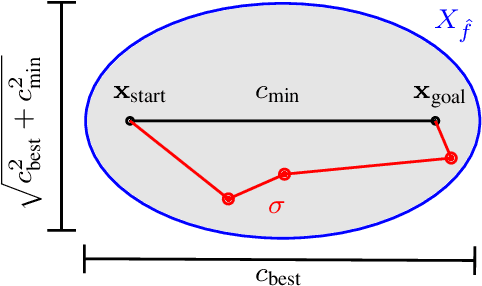
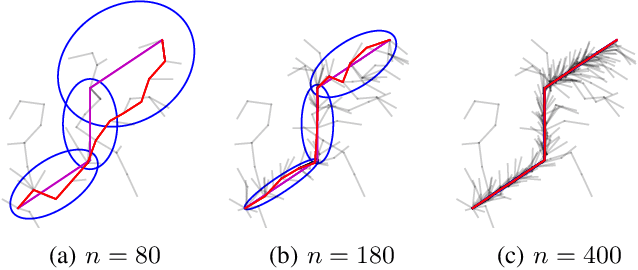
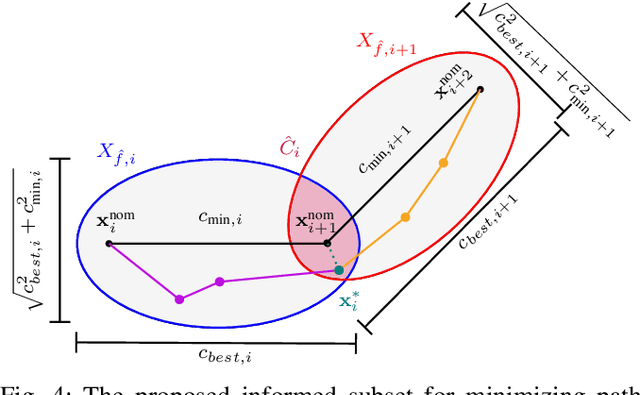
This paper addresses local path re-planning for $n$-dimensional systems by introducing an informed sampling scheme and cost function to achieve collision avoidance with minimum deviation from an (optimal) nominal path. The proposed informed subset consists of the union of ellipsoids along the specified nominal path, such that the subset efficiently encapsulates all points along the nominal path. The cost function penalizes large deviations from the nominal path, thereby ensuring current safety in the face of potential collisions while retaining most of the overall efficiency of the nominal path. The proposed method is demonstrated on scenarios related to the navigation of autonomous marine crafts.
Cyber-resilience for marine navigation by information fusion and change detection
Feb 01, 2022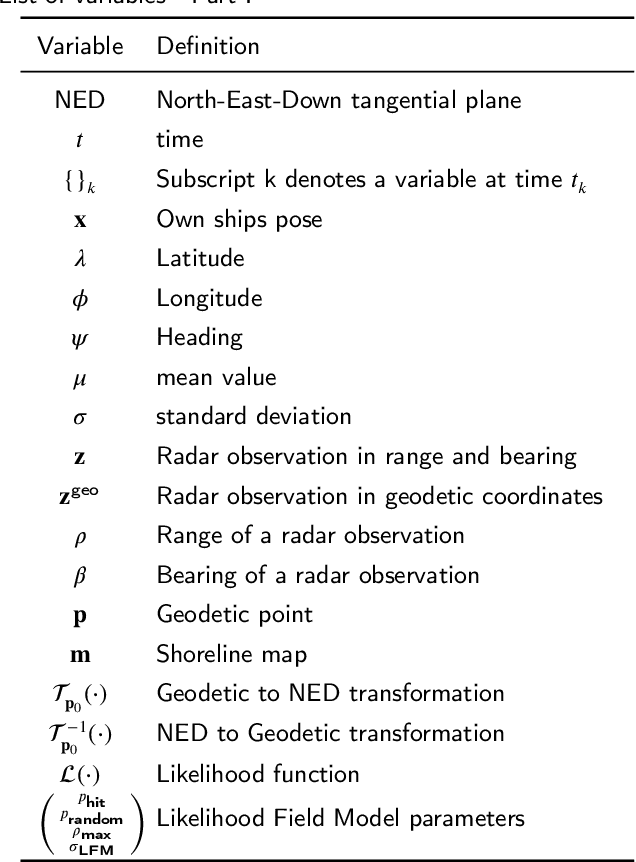

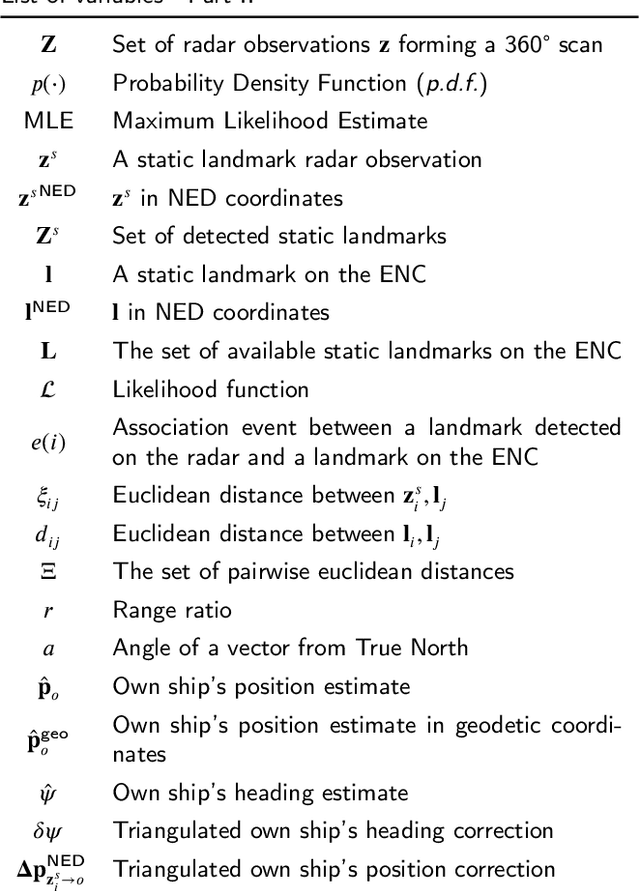
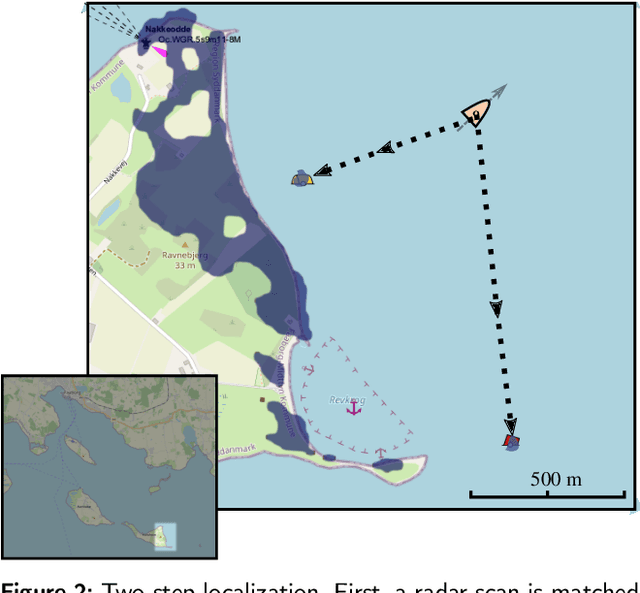
Cyber-resilience is an increasing concern in developing autonomous navigation solutions for marine vessels. This paper scrutinizes cyber-resilience properties of marine navigation through a prism with three edges: multiple sensor information fusion, diagnosis of not-normal behaviours, and change detection. It proposes a two-stage estimator for diagnosis and mitigation of sensor signals used for coastal navigation. Developing a Likelihood Field approach, a first stage extracts shoreline features from radar and matches them to the electronic navigation chart. A second stage associates buoy and beacon features from the radar with chart information. Using real data logged at sea tests combined with simulated spoofing, the paper verifies the ability to timely diagnose and isolate an attempt to compromise position measurements. A new approach is suggested for high level processing of received data to evaluate their consistency, that is agnostic to the underlying technology of the individual sensory input. A combined parametric Gaussian modelling and Kernel Density Estimation is suggested and compared with a generalized likelihood ratio change detector that uses sliding windows. The paper shows how deviations from nominal behaviour and isolation of the components is possible when under attack or when defects in sensors occur.
Guaranteed Rejection-free Sampling Method Using Past Behaviours for Motion Planning of Autonomous Systems
Sep 29, 2021
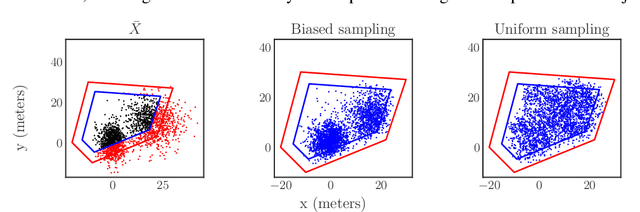
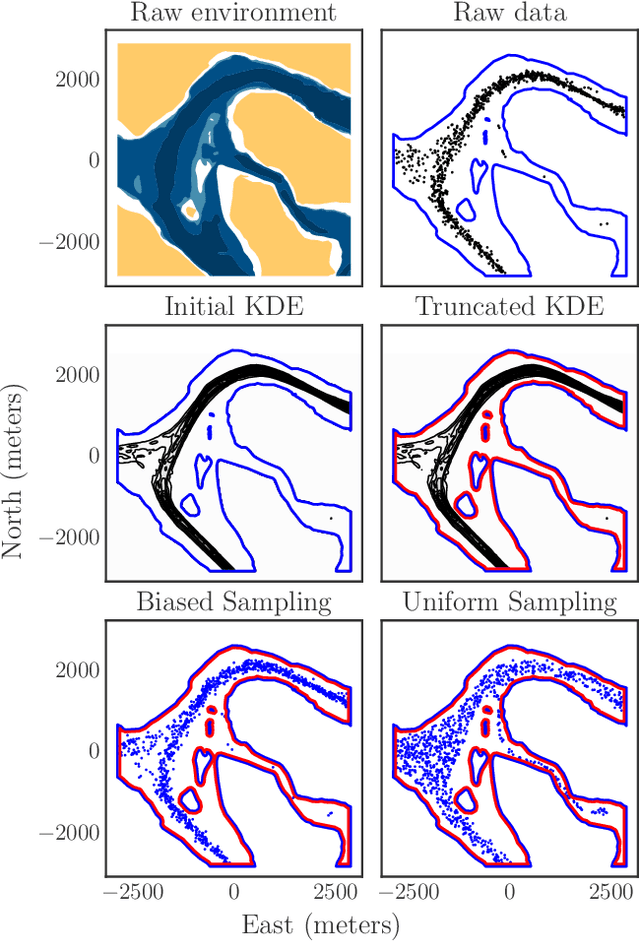

The paper presents a novel learning-based sampling strategy that guarantees rejection-free sampling of the free space in both biased and uniform conditions. Data of past configurations of the autonomous system performing a repetitive task is leveraged to estimate a non-parametric probabilistic description of the region of the free space where feasible solutions of the motion planning problem are likely to be found. The tuning parameters of the kernel density estimator -- the bandwidth and the kernel -- are then used to properly alter the description of the free space such that no sampled configuration can fall outside the original free space. The paper demonstrates the proposed method on two case studies: the first showcases the sampling strategies on 2D historical data from real surface vessels, whereas the second applies the method on 3D drone data gathered from a real quadrotor system. Both instances show that the proposed biased and approximately uniform sampling schemes are able to guarantee rejection-free sampling of the considered workspaces.
Grounding-aware RRT* for Path Planning and Safe Navigation of Marine Crafts in Confined Waters
Sep 14, 2021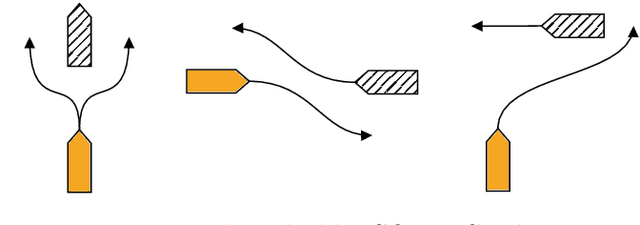
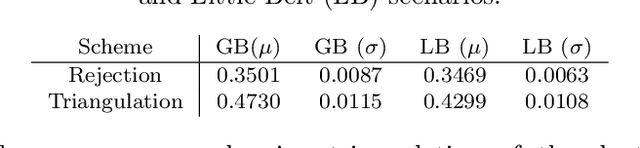
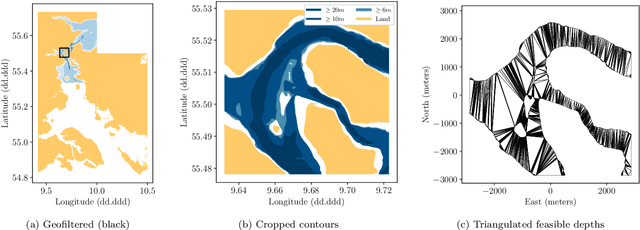
The paper presents a path planning algorithm based on RRT* that addresses the risk of grounding during evasive manoeuvres to avoid collision. The planner achieves this objective by integrating a collective navigation experience with the systematic use of water depth information from the electronic navigational chart. Multivariate kernel density estimation is applied to historical AIS data to generate a probabilistic model describing seafarer's best practices while sailing in confined waters. This knowledge is then encoded into the RRT* cost function to penalize path deviations that would lead own ship to sail in shallow waters. Depth contours satisfying the own ship draught define the actual navigable area, and triangulation of this non-convex region is adopted to enable uniform sampling. This ensures the optimal path deviation.