 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGrounding-aware RRT* for Path Planning and Safe Navigation of Marine Crafts in Confined Waters
Paper and Code
Sep 14, 2021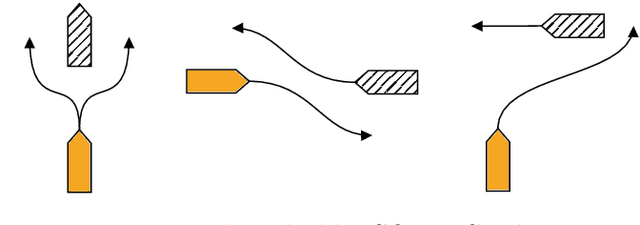
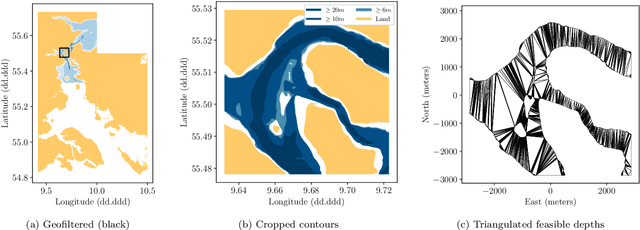
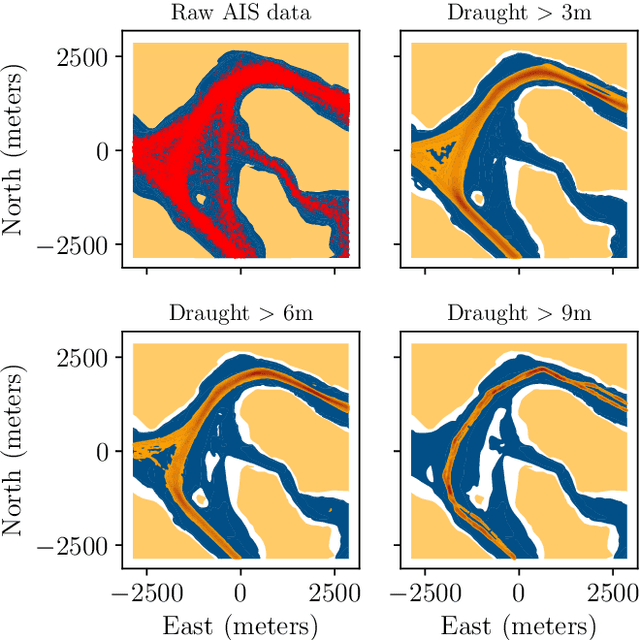
The paper presents a path planning algorithm based on RRT* that addresses the risk of grounding during evasive manoeuvres to avoid collision. The planner achieves this objective by integrating a collective navigation experience with the systematic use of water depth information from the electronic navigational chart. Multivariate kernel density estimation is applied to historical AIS data to generate a probabilistic model describing seafarer's best practices while sailing in confined waters. This knowledge is then encoded into the RRT* cost function to penalize path deviations that would lead own ship to sail in shallow waters. Depth contours satisfying the own ship draught define the actual navigable area, and triangulation of this non-convex region is adopted to enable uniform sampling. This ensures the optimal path deviation.