Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInformed Sampling-based Collision Avoidance with Least Deviation from the Nominal Path
Paper and Code
Oct 24, 2022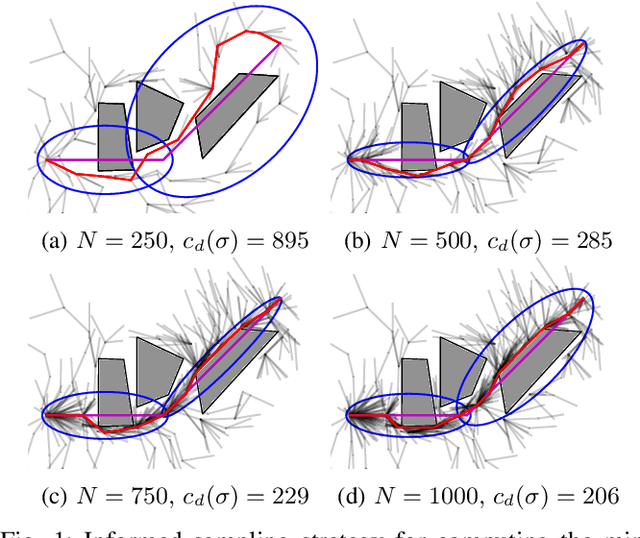
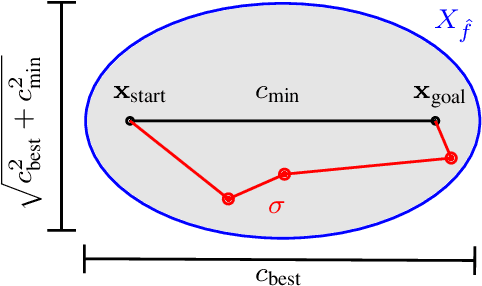
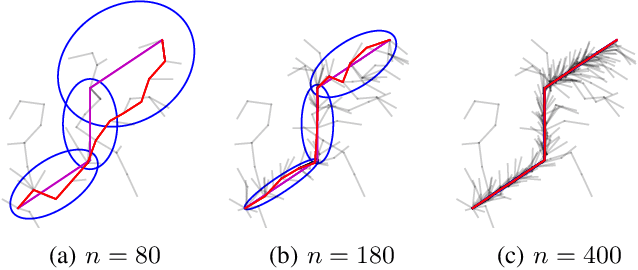
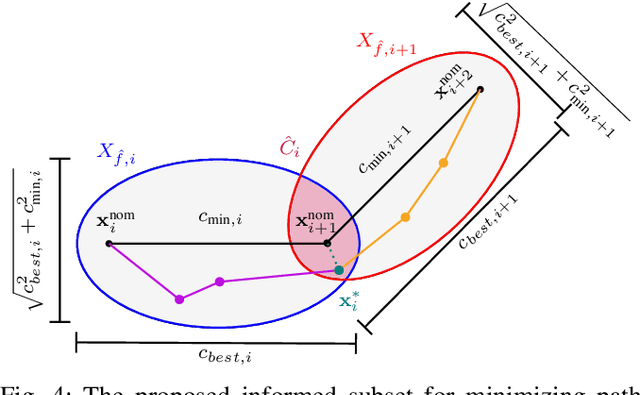
This paper addresses local path re-planning for $n$-dimensional systems by introducing an informed sampling scheme and cost function to achieve collision avoidance with minimum deviation from an (optimal) nominal path. The proposed informed subset consists of the union of ellipsoids along the specified nominal path, such that the subset efficiently encapsulates all points along the nominal path. The cost function penalizes large deviations from the nominal path, thereby ensuring current safety in the face of potential collisions while retaining most of the overall efficiency of the nominal path. The proposed method is demonstrated on scenarios related to the navigation of autonomous marine crafts.
* Accepted for publication at IROS'2022
View paper on