 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGuaranteed Rejection-free Sampling Method Using Past Behaviours for Motion Planning of Autonomous Systems
Paper and Code
Sep 29, 2021
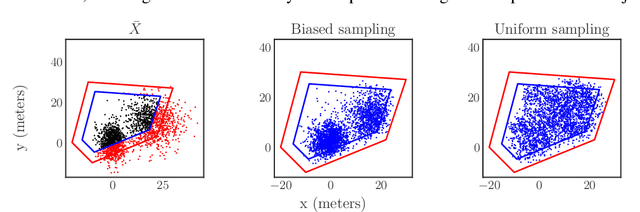
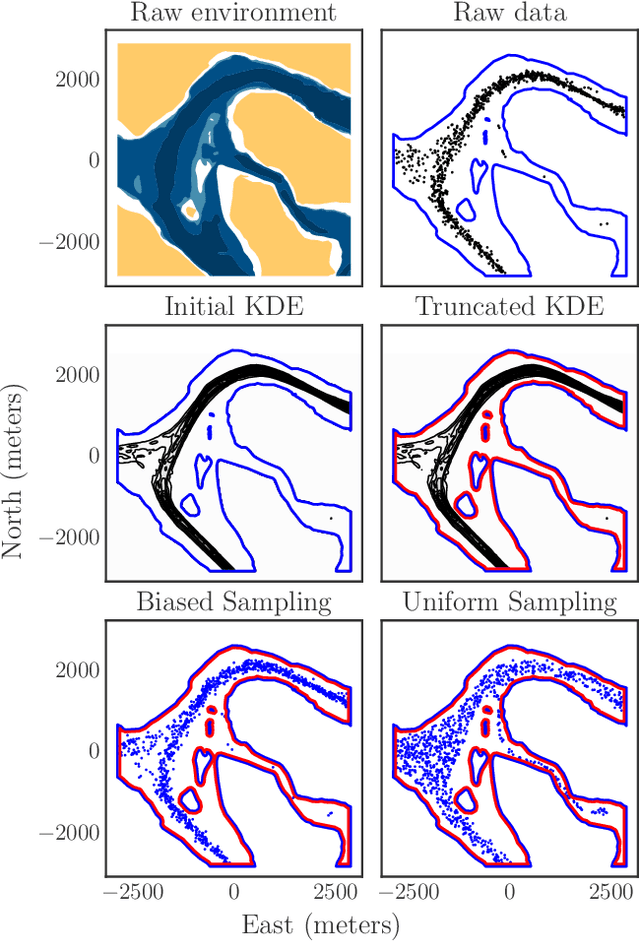

The paper presents a novel learning-based sampling strategy that guarantees rejection-free sampling of the free space in both biased and uniform conditions. Data of past configurations of the autonomous system performing a repetitive task is leveraged to estimate a non-parametric probabilistic description of the region of the free space where feasible solutions of the motion planning problem are likely to be found. The tuning parameters of the kernel density estimator -- the bandwidth and the kernel -- are then used to properly alter the description of the free space such that no sampled configuration can fall outside the original free space. The paper demonstrates the proposed method on two case studies: the first showcases the sampling strategies on 2D historical data from real surface vessels, whereas the second applies the method on 3D drone data gathered from a real quadrotor system. Both instances show that the proposed biased and approximately uniform sampling schemes are able to guarantee rejection-free sampling of the considered workspaces.