 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStochastic COLREGs Evaluation for Safe Navigation under Uncertainty
Feb 08, 2024The encounter situation between marine vessels determines how they should navigate to obey COLREGs, but time-varying and stochastic uncertainty in estimation of angles of encounter, and of closest point of approach, easily give rise to different assessment of situation at two approaching vessels. This may lead to high-risk conditions and could cause collision. This article considers decision making under uncertainty and suggests a novel method for probabilistic interpretation of vessel encounters that is explainable and provides a measure of uncertainty in the evaluation. The method is equally useful for decision support on a manned bridge as on Marine Autonomous Surface Ships (MASS) where it provides input for automated navigation. The method makes formal safety assessment and validation feasible. We obtain a resilient algorithm for machine interpretation of COLREGs under uncertainty and show its efficacy by simulations.
Autonomous Navigation in Confined Waters -- A COLREGs Rule 9 Compliant Framework
Jul 17, 2022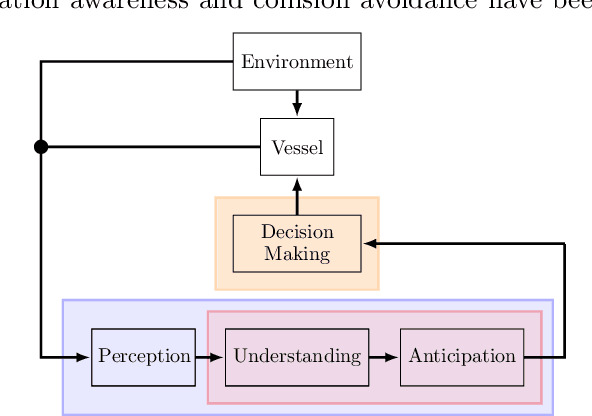


Fully or partial autonomous marine vessels are actively being developed by many industry actors. In many cases, the autonomous vessels will be operating close to shore, and within range of a Remote Control Center (RCC). Close to shore operation requires that the autonomous vessel is able to navigate in close proximity to other autonomous or manned vessels, and possibly in confined waters, while obeying the COLREGs on equal terms as any other vessel at sea. In confined waters however, certain COLREGs rules apply, which might alter the expected actions (give-way or stand-on), depending on the manoeuvrability of the vessels. This paper presents a Situation Awareness (SAS) framework for autonomous navigation that complies with COLREGs rule 9 (Narrow Channels). The proposed solution comprises a method for evaluating the manoeuvrability of a vessel in confined waters, for assessing the applicability of COLREGs rule 9. This feature is then integrated into an already existing SAS framework for facilitating COLREGs-compliant navigation in restricted waters. The applicability of the proposed method is demonstrated in simulation using a case study of a small autonomous passenger ferry.