 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA control scheme for collaborative object transportation between a human and a quadruped robot using the MIGHTY suction cup
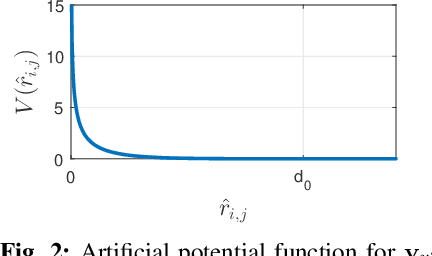
Aug 01, 2025In this work, a control scheme for human-robot collaborative object transportation is proposed, considering a quadruped robot equipped with the MIGHTY suction cup that serves both as a gripper for holding the object and a force/torque sensor. The proposed control scheme is based on the notion of admittance control, and incorporates a variable damping term aiming towards increasing the controllability of the human and, at the same time, decreasing her/his effort. Furthermore, to ensure that the object is not detached from the suction cup during the collaboration, an additional control signal is proposed, which is based on a barrier artificial potential. The proposed control scheme is proven to be passive and its performance is demonstrated through experimental evaluations conducted using the Unitree Go1 robot equipped with the MIGHTY suction cup.
* Please find the citation info @ Zenodo, ArXiv or Zenodo, as the proceedings of ICRA are no longer sent to IEEE Xplore
On the capabilities of LLMs for classifying and segmenting time series of fruit picking motions into primitive actions
Jul 10, 2025Despite their recent introduction to human society, Large Language Models (LLMs) have significantly affected the way we tackle mental challenges in our everyday lives. From optimizing our linguistic communication to assisting us in making important decisions, LLMs, such as ChatGPT, are notably reducing our cognitive load by gradually taking on an increasing share of our mental activities. In the context of Learning by Demonstration (LbD), classifying and segmenting complex motions into primitive actions, such as pushing, pulling, twisting etc, is considered to be a key-step towards encoding a task. In this work, we investigate the capabilities of LLMs to undertake this task, considering a finite set of predefined primitive actions found in fruit picking operations. By utilizing LLMs instead of simple supervised learning or analytic methods, we aim at making the method easily applicable and deployable in a real-life scenario. Three different fine-tuning approaches are investigated, compared on datasets captured kinesthetically, using a UR10e robot, during a fruit-picking scenario.
Learning-based Delay Compensation for Enhanced Control of Assistive Soft Robots
Apr 16, 2025Soft robots are increasingly used in healthcare, especially for assistive care, due to their inherent safety and adaptability. Controlling soft robots is challenging due to their nonlinear dynamics and the presence of time delays, especially in applications like a soft robotic arm for patient care. This paper presents a learning-based approach to approximate the nonlinear state predictor (Smith Predictor), aiming to improve tracking performance in a two-module soft robot arm with a short inherent input delay. The method uses Kernel Recursive Least Squares Tracker (KRLST) for online learning of the system dynamics and a Legendre Delay Network (LDN) to compress past input history for efficient delay compensation. Experimental results demonstrate significant improvement in tracking performance compared to a baseline model-based non-linear controller. Statistical analysis confirms the significance of the improvements. The method is computationally efficient and adaptable online, making it suitable for real-world scenarios and highlighting its potential for enabling safer and more accurate control of soft robots in assistive care applications.
Multi-Wheeled Passive Sliding with Fully-Actuated Aerial Robots: Tip-Over Recovery and Avoidance
May 29, 2024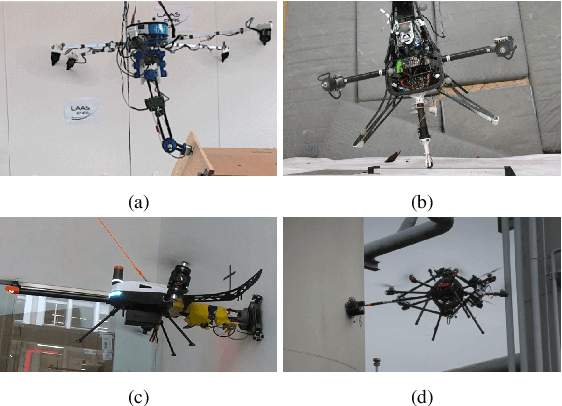
Push-and-slide tasks carried out by fully-actuated aerial robots can be used for inspection and simple maintenance tasks at height, such as non-destructive testing and painting. Often, an end-effector based on multiple non-actuated contact wheels is used to contact the surface. This approach entails challenges in ensuring consistent wheel contact with a surface whose exact orientation and location might be uncertain due to sensor aliasing and drift. Using a standard full-pose controller dependent on the inaccurate surface position and orientation may cause wheels to lose contact during sliding, and subsequently lead to robot tip-over. To address the tip-over issue, we present two approaches: (1) tip-over avoidance guidelines for hardware design, and (2) control for tip-over recovery and avoidance. Physical experiments with a fully-actuated aerial vehicle were executed for a push-and-slide task on a flat surface. The resulting data is used in deriving tip-over avoidance guidelines and designing a simulator that closely captures real-world conditions. We then use the simulator to test the effectiveness and robustness of the proposed approaches in risky scenarios against uncertainties.
Stochastic COLREGs Evaluation for Safe Navigation under Uncertainty
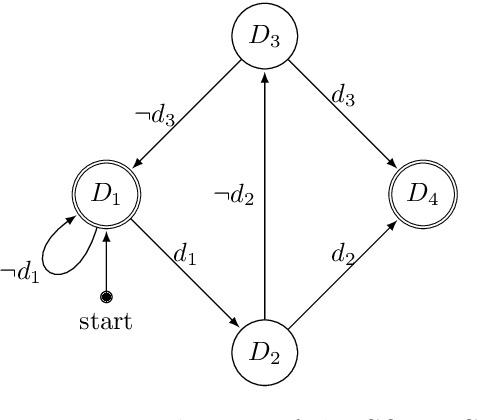
Feb 08, 2024The encounter situation between marine vessels determines how they should navigate to obey COLREGs, but time-varying and stochastic uncertainty in estimation of angles of encounter, and of closest point of approach, easily give rise to different assessment of situation at two approaching vessels. This may lead to high-risk conditions and could cause collision. This article considers decision making under uncertainty and suggests a novel method for probabilistic interpretation of vessel encounters that is explainable and provides a measure of uncertainty in the evaluation. The method is equally useful for decision support on a manned bridge as on Marine Autonomous Surface Ships (MASS) where it provides input for automated navigation. The method makes formal safety assessment and validation feasible. We obtain a resilient algorithm for machine interpretation of COLREGs under uncertainty and show its efficacy by simulations.
Two-layer adaptive trajectory tracking controller for quadruped robots on slippery terrains
Apr 03, 2023Task space trajectory tracking for quadruped robots plays a crucial role on achieving dexterous maneuvers in unstructured environments. To fulfill the control objective, the robot should apply forces through the contact of the legs with the supporting surface, while maintaining its stability and controllability. In order to ensure the operation of the robot under these conditions, one has to account for the possibility of unstable contact of the legs that arises when the robot operates on partially or globally slippery terrains. In this work, we propose an adaptive trajectory tracking controller for quadruped robots, which involves two prioritized layers of adaptation for avoiding possible slippage of one or multiple legs. The adaptive framework is evaluated through simulations and validated through experiments.
Bimanual crop manipulation for human-inspired robotic harvesting
Sep 13, 2022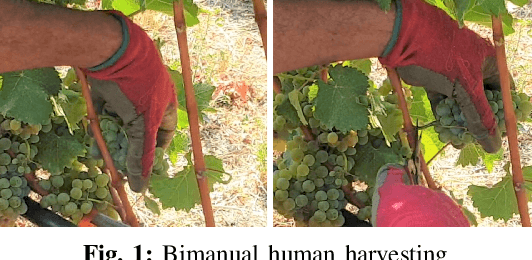
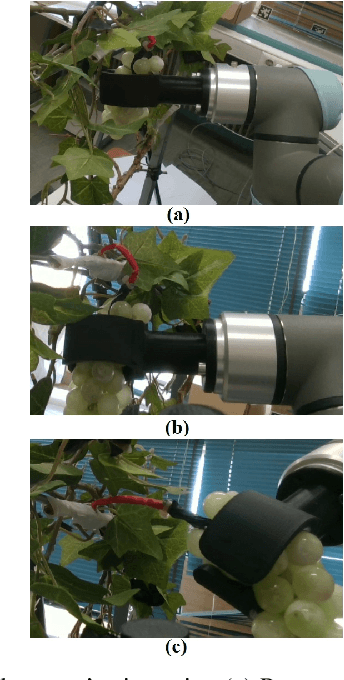
Most existing robotic harvesters utilize a unimanual approach; a single arm grasps the crop and detaches it, either via a detachment movement, or by cutting its stem with a specially designed gripper/cutter end-effector. However, such unimanual solutions cannot be applied for sensitive crops and cluttered environments like grapes and a vineyard where obstacles may occlude the stem and leave no space for the cutter's placement. In such cases, the solution would require a bimanual robot in order to visually unveil the stem and manipulate the grasped crop to create cutting affordances which is similar to the practice used by humans. In this work, a dual-arm coordinated motion control methodology for reaching a stem pre-cut state is proposed. The camera equipped arm with the cutter is reaching the stem, unveiling it as much as possible, while the second arm is moving the grasped crop towards the surrounding free-space to facilitate its stem cutting. Lab experimentation on a mock-up vine setup with a plastic grape cluster evaluates the proposed methodology, involving two UR5e robotic arms and a RealSense D415 camera.
Autonomous Navigation in Confined Waters -- A COLREGs Rule 9 Compliant Framework
Jul 17, 2022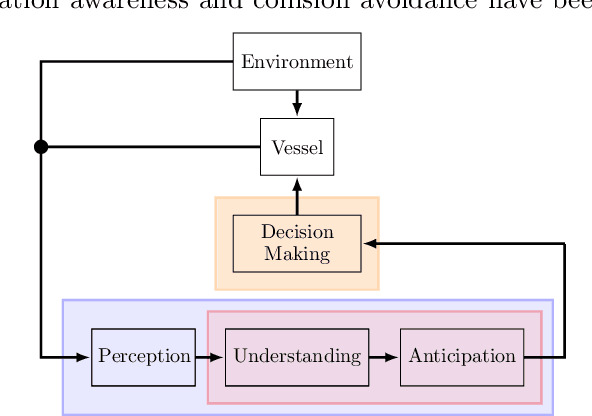


Fully or partial autonomous marine vessels are actively being developed by many industry actors. In many cases, the autonomous vessels will be operating close to shore, and within range of a Remote Control Center (RCC). Close to shore operation requires that the autonomous vessel is able to navigate in close proximity to other autonomous or manned vessels, and possibly in confined waters, while obeying the COLREGs on equal terms as any other vessel at sea. In confined waters however, certain COLREGs rules apply, which might alter the expected actions (give-way or stand-on), depending on the manoeuvrability of the vessels. This paper presents a Situation Awareness (SAS) framework for autonomous navigation that complies with COLREGs rule 9 (Narrow Channels). The proposed solution comprises a method for evaluating the manoeuvrability of a vessel in confined waters, for assessing the applicability of COLREGs rule 9. This feature is then integrated into an already existing SAS framework for facilitating COLREGs-compliant navigation in restricted waters. The applicability of the proposed method is demonstrated in simulation using a case study of a small autonomous passenger ferry.
A controller for reaching and unveiling a partially occluded object of interest with an eye-in-hand robot
Dec 17, 2021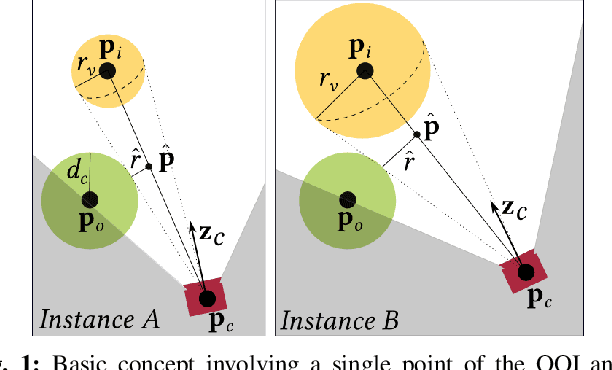
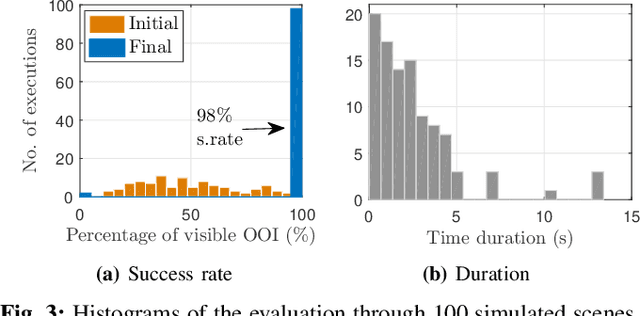
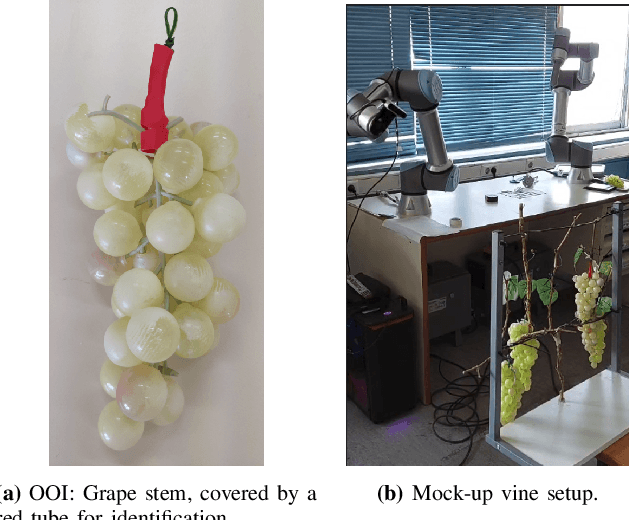
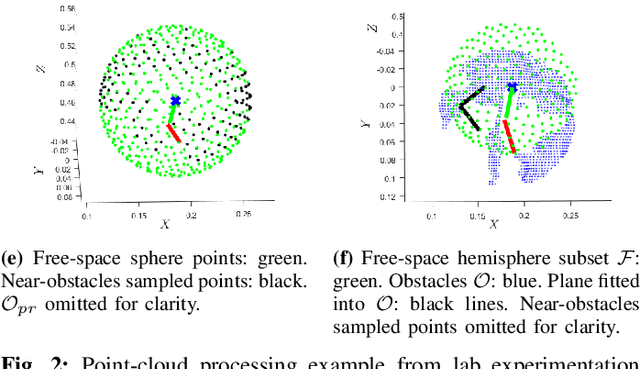
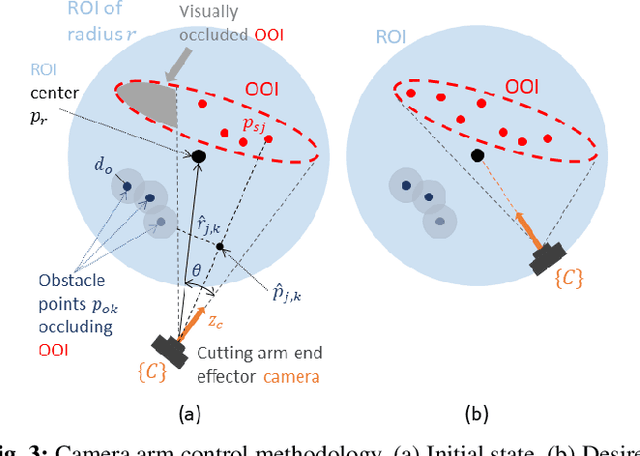
In this work, a control scheme for approaching and unveiling a partially occluded object of interest is proposed.The control scheme is based only on the classified point cloud obtained by the in-hand camera attached to the robot's end effector. It is shown that the proposed controller reaches in the vicinity of the object progressively unveiling the neighborhood of each visible point of the object of interest. It can therefore potentially achieve the complete unveiling of the object. The proposed control scheme is evaluated through simulations and experiments with a UR5e robot with an in-hand RealSense camera on a mock-up vine setup for unveiling the stem of a grape.