 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTwo-layer adaptive trajectory tracking controller for quadruped robots on slippery terrains
Apr 03, 2023Task space trajectory tracking for quadruped robots plays a crucial role on achieving dexterous maneuvers in unstructured environments. To fulfill the control objective, the robot should apply forces through the contact of the legs with the supporting surface, while maintaining its stability and controllability. In order to ensure the operation of the robot under these conditions, one has to account for the possibility of unstable contact of the legs that arises when the robot operates on partially or globally slippery terrains. In this work, we propose an adaptive trajectory tracking controller for quadruped robots, which involves two prioritized layers of adaptation for avoiding possible slippage of one or multiple legs. The adaptive framework is evaluated through simulations and validated through experiments.
Probabilistic Contact State Estimation for Legged Robots using Inertial Information
Mar 04, 2023Legged robot navigation in unstructured and slippery terrains depends heavily on the ability to accurately identify the quality of contact between the robot's feet and the ground. Contact state estimation is regarded as a challenging problem and is typically addressed by exploiting force measurements, joint encoders and/or robot kinematics and dynamics. In contrast to most state of the art approaches, the current work introduces a novel probabilistic method for estimating the contact state based solely on proprioceptive sensing, as it is readily available by Inertial Measurement Units (IMUs) mounted on the robot's end effectors. Capitalizing on the uncertainty of IMU measurements, our method estimates the probability of stable contact. This is accomplished by approximating the multimodal probability density function over a batch of data points for each axis of the IMU with Kernel Density Estimation. The proposed method has been extensively assessed against both real and simulated scenarios on bipedal and quadrupedal robotic platforms such as ATLAS, TALOS and Unitree's GO1.
Robust Contact State Estimation in Humanoid Walking Gaits
Jul 30, 2022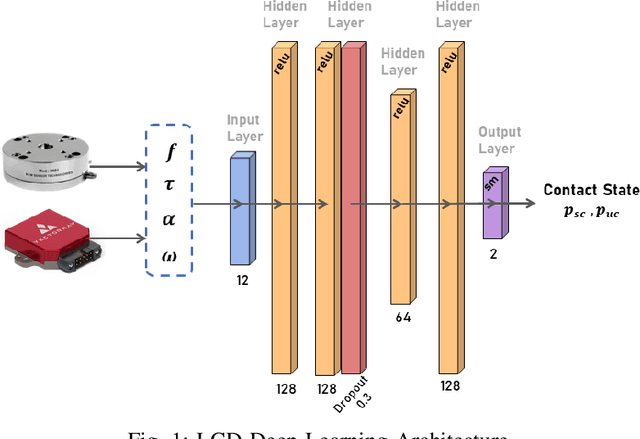
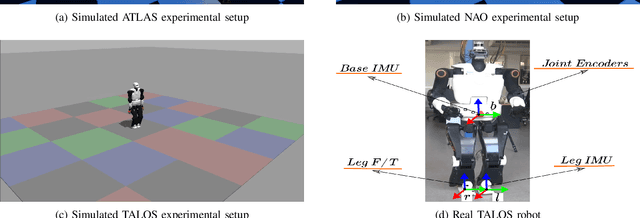
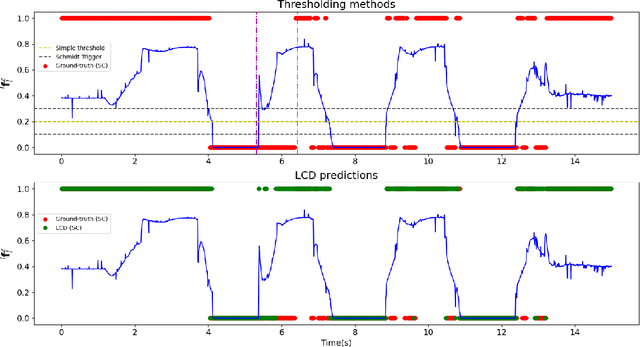
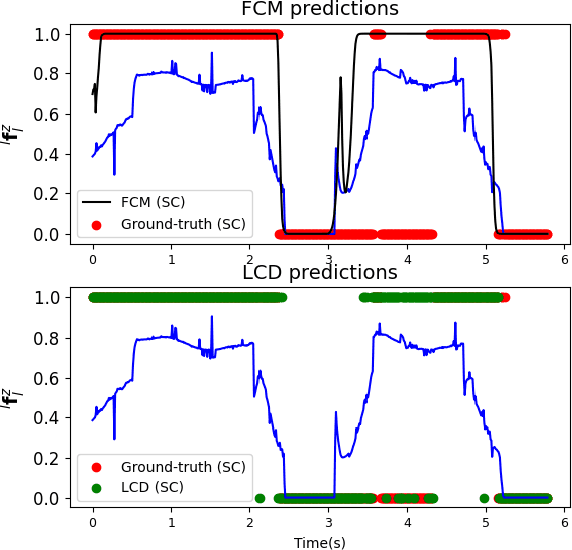
In this article, we propose a deep learning framework that provides a unified approach to the problem of leg contact detection in humanoid robot walking gaits. Our formulation accomplishes to accurately and robustly estimate the contact state probability for each leg (i.e., stable or slip/no contact). The proposed framework employs solely proprioceptive sensing and although it relies on simulated ground-truth contact data for the classification process, we demonstrate that it generalizes across varying friction surfaces and different legged robotic platforms and, at the same time, is readily transferred from simulation to practice. The framework is quantitatively and qualitatively assessed in simulation via the use of ground-truth contact data and is contrasted against state of-the-art methods with an ATLAS, a NAO, and a TALOS humanoid robot. Furthermore, its efficacy is demonstrated in base estimation with a real TALOS humanoid. To reinforce further research endeavors, our implementation is offered as an open-source ROS/Python package, coined Legged Contact Detection (LCD).