 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSoliro -- a hybrid dynamic tilt-wing aerial manipulator with minimal actuators
Dec 08, 2023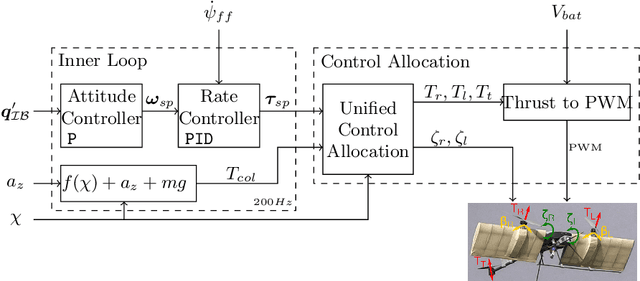
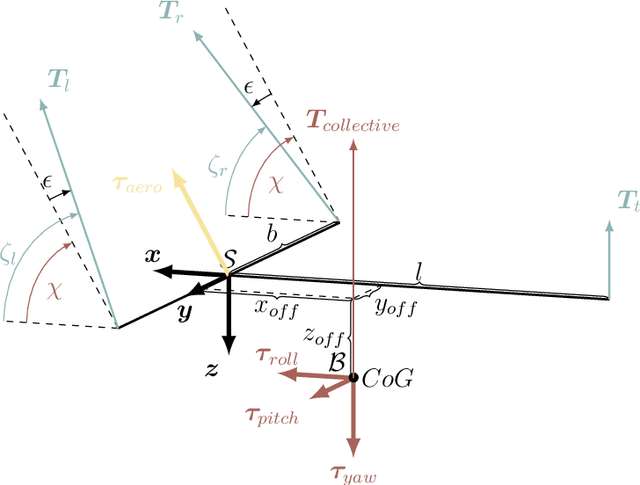
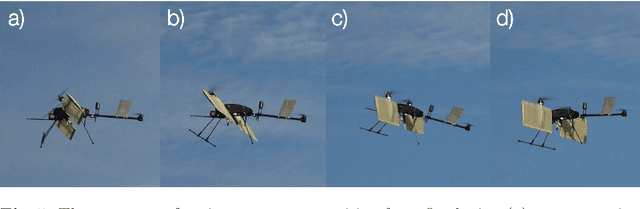
The ability to enter in contact with and manipulate physical objects with a flying robot enables many novel applications, such as contact inspection, painting, drilling, and sample collection. Generally, these aerial robots need more degrees of freedom than a standard quadrotor. While there is active research of over-actuated, omnidirectional MAVs and aerial manipulators as well as VTOL and hybrid platforms, the two concepts have not been combined. We address the problem of conceptualization, characterization, control, and testing of a 5DOF rotary-/fixed-wing hybrid, tilt-rotor, split tilt-wing, nearly omnidirectional aerial robot. We present an elegant solution with a minimal set of actuators and that does not need any classical control surfaces or flaps. The concept is validated in a wind tunnel study and in multiple flights with forward and backward transitions. Fixed-wing flight speeds up to 10 m/s were reached, with a power reduction of 30% as compared to rotary wing flight.
RoBoa: Construction and Evaluation of a Steerable Vine Robot for Search and Rescue Applications
Mar 28, 2022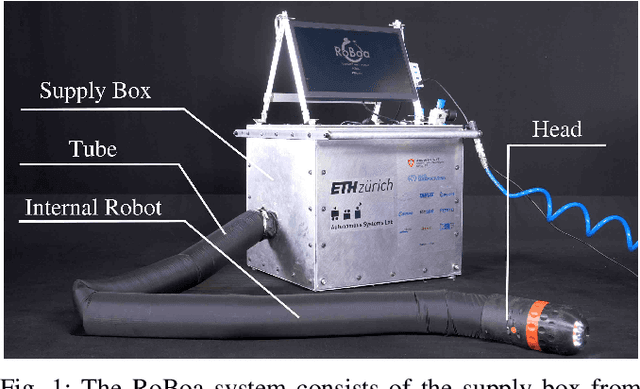
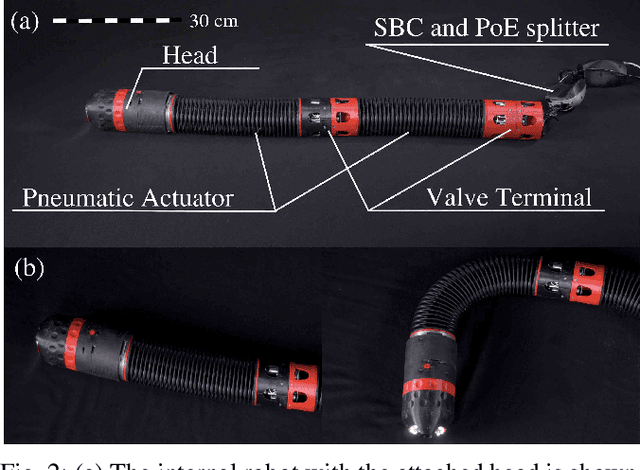
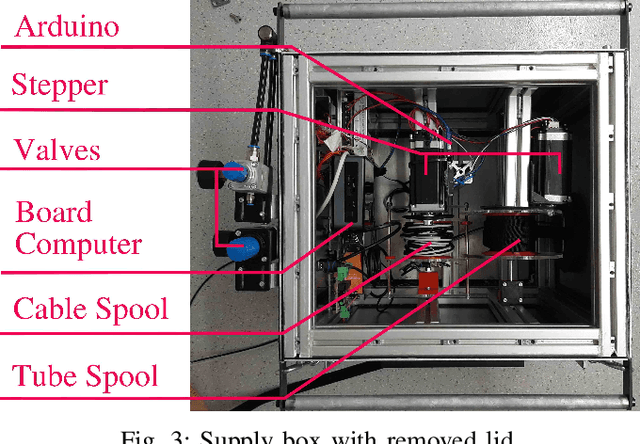
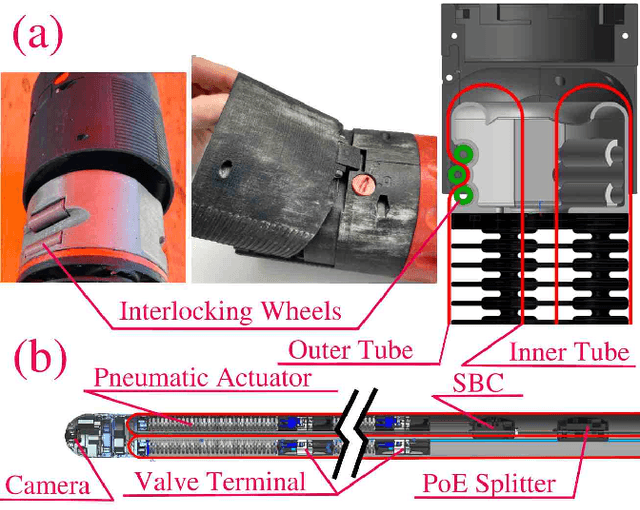
RoBoa is a vine-like search and rescue robot that can explore narrow and cluttered environments such as destroyed buildings. The robot assists rescue teams in finding and communicating with trapped people. It employs the principle of vine robots for locomotion, everting the tip of its tube to move forward. Inside the tube, pneumatic actuators enable lateral movement. The head carries sensors and is mounted outside at the tip of the tube. At the back, a supply box contains the rolled up tube and provides pressurized air, power, computation, as well as an interface for the user to interact with the system. A decentralized control scheme was implemented that reduces the required number of cables and takes care of the low-level control of the pneumatic actuators. The design, characterization, and experimental evaluation of the system and its crucial components is shown. The complete prototype is fully functional and was evaluated in a realistic environment of a collapsed building where the remote-controlled robot was able to repeatedly locate a trapped person after a travel distance of about 10 m.
* 6 pages, 5 figures, 2021 IEEE 4th International Conference on Soft Robotics (RoboSoft). For associated video, see this https://www.youtube.com/watch?v=W6wlZ9kaUvo
Traversing Steep and Granular Martian Analog Slopes With a Dynamic Quadrupedal Robot
Jun 03, 2021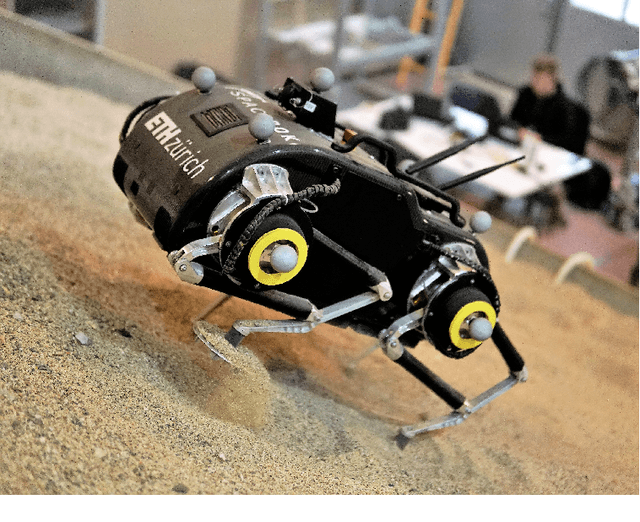
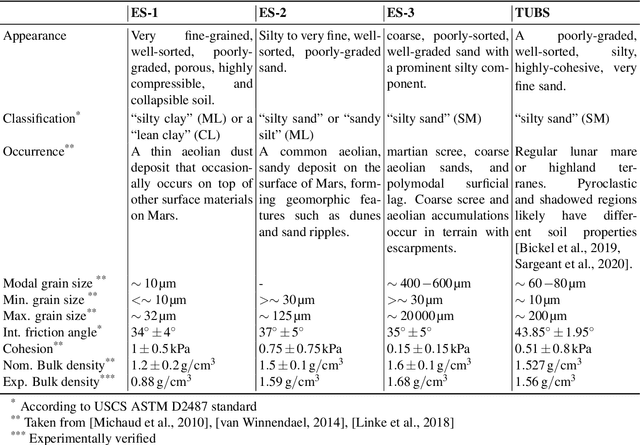
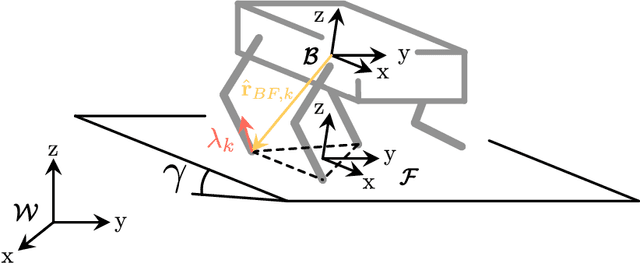
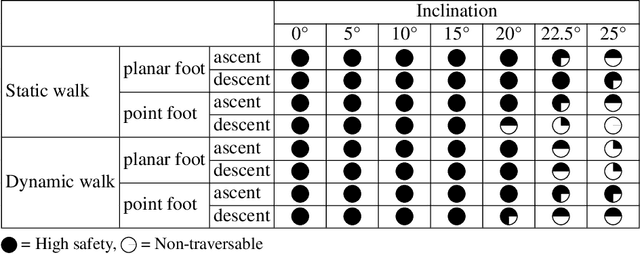
Celestial bodies such as the Moon and Mars are mainly covered by loose, granular soil, a notoriously challenging terrain to traverse with (wheeled) robotic systems. Here, we present experimental work on traversing steep, granular slopes with the dynamically walking quadrupedal robot SpaceBok. To adapt to the challenging environment, we developed passive-adaptive planar feet and optimized grouser pads to reduce sinkage and increase traction on planar and inclined granular soil. Single-foot experiments revealed that a large surface area of 110cm2 per foot reduces sinkage to an acceptable level even on highly collapsible soil (ES-1). Implementing several 12mm grouser blades increases traction by 22% to 66% on granular media compared to grouser-less designs. Together with a terrain-adapting walking controller, we validate - for the first time - static and dynamic locomotion on Mars analog slopes of up to 25{\deg}(the maximum of the testbed). We evaluated the performance between point- and planar feet and static and dynamic gaits regarding stability (safety), velocity, and energy consumption. We show that dynamic gaits are energetically more efficient than static gaits but are riskier on steep slopes. Our tests also revealed that planar feet's energy consumption drastically increases when the slope inclination approaches the soil's angle of internal friction due to shearing. Point feet are less affected by slippage due to their excessive sinkage, but in turn, are prone to instabilities and tripping. We present and discuss safe and energy-efficient global path-planning strategies for accessing steep topography on Mars based on our findings.
Design, Optimal Guidance and Control of a Low-cost Re-usable Electric Model Rocket
Mar 08, 2021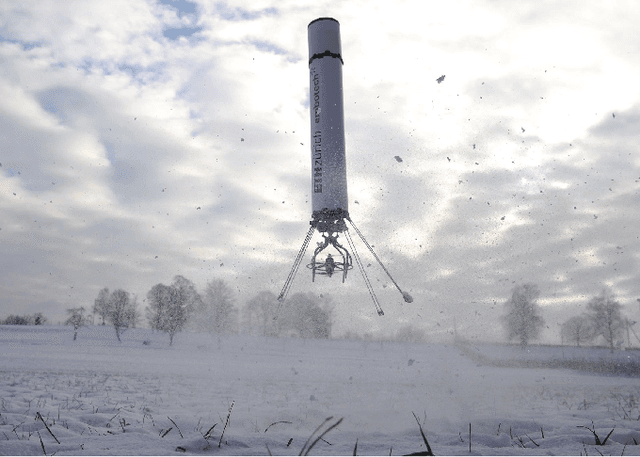
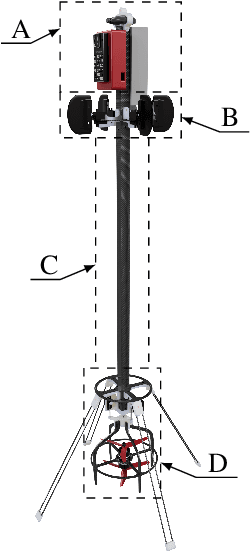
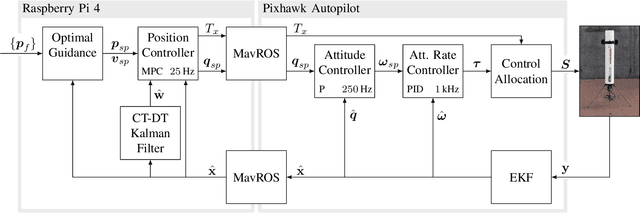
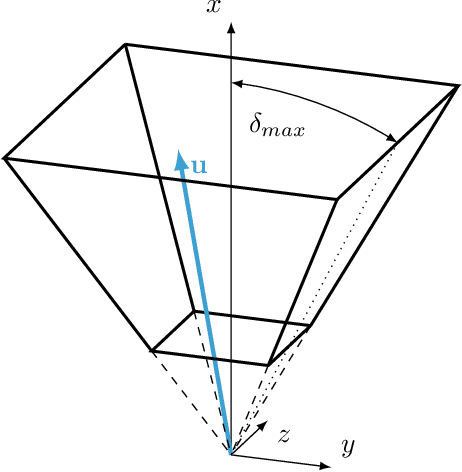
In the last decade, autonomous vertical take-off and landing (VTOL) vehicles have become increasingly important as they lower mission costs thanks to their re-usability. However, their development is complex, rendering even the basic experimental validation of the required advanced guidance and control (G & C) algorithms prohibitively time-consuming and costly. In this paper, we present the design of an inexpensive small-scale VTOL platform that can be built from off-the-shelf components for less than 1000 USD. The vehicle design mimics the first stage of a reusable launcher, making it a perfect test-bed for G & C algorithms. To control the vehicle during ascent and descent, we propose a real-time optimization-based G & C algorithm. The key features are a real-time minimum fuel and free-final-time optimal guidance combined with an offset-free tracking model predictive position controller. The vehicle hardware design and the G & C algorithm are experimentally validated both indoors and outdoor, showing reliable operation in a fully autonomous fashion with all computations done on-board and in real-time.