 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVISION-SLS: Safe Perception-Based Control from Learned Visual Representations via System Level Synthesis
Apr 27, 2026We propose VISION-SLS, a method for nonlinear output-feedback control from high-resolution RGB images which provides robust constraint satisfaction guarantees under calibrated uncertainty bounds despite partial observability, sensor noise, and nonlinear dynamics. To enable scalability while retaining guarantees, we propose: (i) a learned low-dimensional observation map from pretrained visual features with state-dependent error bounds, and (ii) a causal affine time-varying output-feedback policy optimized via System Level Synthesis (SLS). We develop a scalable, novel solver for the resulting nonconvex program that leverages sequential convex programming coupled with efficient Riccati recursions. On two simulated visuomotor tasks (a 4D car and a 10D quadrotor) with >= 512 x 512 pixels and a 59D humanoid task with partial observability, our method enables safe, information-gathering behavior that reduces uncertainty while guaranteeing constraint satisfaction with empirically-calibrated error bounds. We also validate our method on hardware, safely controlling a ground vehicle from onboard images, outperforming baselines in safety rate and solve times. Together, these results show that learned visual abstractions coupled with an efficient solver make SLS-based safe visuomotor output-feedback practical at scale. The code implementation of our method is available at https://github.com/trustworthyrobotics/VISION-SLS.
Distributed Predictive Control Barrier Functions: Towards Scalable Safety Certification in Modular Multi-Agent Systems
Mar 31, 2026We consider safety-critical multi-agent systems with distributed control architectures and potentially varying network topologies. While learning-based distributed control enables scalability and high performance, a lack of formal safety guarantees in the face of unforeseen disturbances and unsafe network topology changes may lead to system failure. To address this challenge, we introduce structured control barrier functions (s-CBFs) as a multi-agent safety framework. The s-CBFs are augmented to a distributed predictive control barrier function (D-PCBF), a predictive, optimization-based safety layer that uses model predictions to guarantee recoverable safety at all times. The proposed approach enables a permissive yet formal plug-and-play protocol, allowing agents to join or leave the network while ensuring safety recovery if a change in network topology requires temporarily unsafe behavior. We validate the formulation through simulations and real-time experiments of a miniature race-car platoon.
Optimistic Online LQR via Intrinsic Rewards
Mar 30, 2026Optimism in the face of uncertainty is a popular approach to balance exploration and exploitation in reinforcement learning. Here, we consider the online linear quadratic regulator (LQR) problem, i.e., to learn the LQR corresponding to an unknown linear dynamical system by adapting the control policy online based on closed-loop data collected during operation. In this work, we propose Intrinsic Rewards LQR (IR-LQR), an optimistic online LQR algorithm that applies the idea of intrinsic rewards originating from reinforcement learning and the concept of variance regularization to promote uncertainty-driven exploration. IR-LQR retains the structure of a standard LQR synthesis problem by only modifying the cost function, resulting in an intuitively pleasing, simple, computationally cheap, and efficient algorithm. This is in contrast to existing optimistic online LQR formulations that rely on more complicated iterative search algorithms or solve computationally demanding optimization problems. We show that IR-LQR achieves the optimal worst-case regret rate of $\sqrt{T}$, and compare it to various state-of-the-art online LQR algorithms via numerical experiments carried out on an aircraft pitch angle control and an unmanned aerial vehicle example.
Real-Time Online Learning for Model Predictive Control using a Spatio-Temporal Gaussian Process Approximation
Mar 18, 2026Learning-based model predictive control (MPC) can enhance control performance by correcting for model inaccuracies, enabling more precise state trajectory predictions than traditional MPC. A common approach is to model unknown residual dynamics as a Gaussian process (GP), which leverages data and also provides an estimate of the associated uncertainty. However, the high computational cost of online learning poses a major challenge for real-time GP-MPC applications. This work presents an efficient implementation of an approximate spatio-temporal GP model, offering online learning at constant computational complexity. It is optimized for GP-MPC, where it enables improved control performance by learning more accurate system dynamics online in real-time, even for time-varying systems. The performance of the proposed method is demonstrated by simulations and hardware experiments in the exemplary application of autonomous miniature racing.
Optimal uncertainty bounds for multivariate kernel regression under bounded noise: A Gaussian process-based dual function
Mar 17, 2026Non-conservative uncertainty bounds are essential for making reliable predictions about latent functions from noisy data--and thus, a key enabler for safe learning-based control. In this domain, kernel methods such as Gaussian process regression are established techniques, thanks to their inherent uncertainty quantification mechanism. Still, existing bounds either pose strong assumptions on the underlying noise distribution, are conservative, do not scale well in the multi-output case, or are difficult to integrate into downstream tasks. This paper addresses these limitations by presenting a tight, distribution-free bound for multi-output kernel-based estimates. It is obtained through an unconstrained, duality-based formulation, which shares the same structure of classic Gaussian process confidence bounds and can thus be straightforwardly integrated into downstream optimization pipelines. We show that the proposed bound generalizes many existing results and illustrate its application using an example inspired by quadrotor dynamics learning.
Design Principles for Sequence Models via Coefficient Dynamics
Oct 10, 2025



Deep sequence models, ranging from Transformers and State Space Models (SSMs) to more recent approaches such as gated linear RNNs, fundamentally compute outputs as linear combinations of past value vectors. To draw insights and systematically compare such architectures, we develop a unified framework that makes this output operation explicit, by casting the linear combination coefficients as the outputs of autonomous linear dynamical systems driven by impulse inputs. This viewpoint, in spirit substantially different from approaches focusing on connecting linear RNNs with linear attention, reveals a common mathematical theme across diverse architectures and crucially captures softmax attention, on top of RNNs, SSMs, and related models. In contrast to new model proposals that are commonly evaluated on benchmarks, we derive design principles linking architectural choices to model properties. Thereby identifying tradeoffs between expressivity and efficient implementation, geometric constraints on input selectivity, and stability conditions for numerically stable training and information retention. By connecting several insights and observations from recent literature, the framework both explains empirical successes of recent designs and provides guiding principles for systematically designing new sequence model architectures.
Task-Level Insights from Eigenvalues across Sequence Models
Oct 10, 2025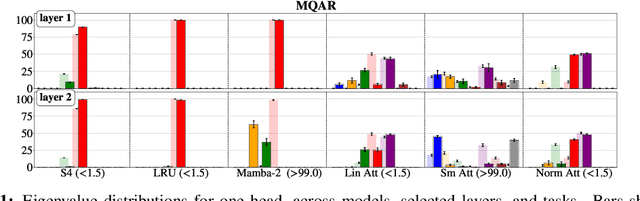
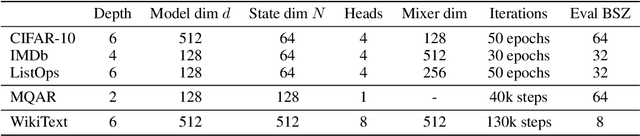
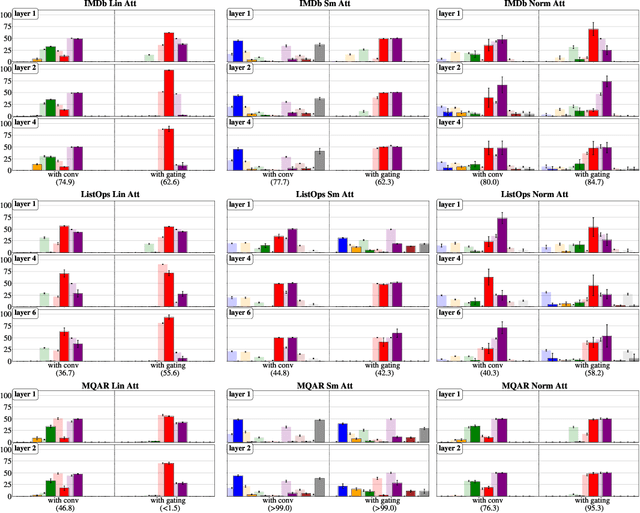
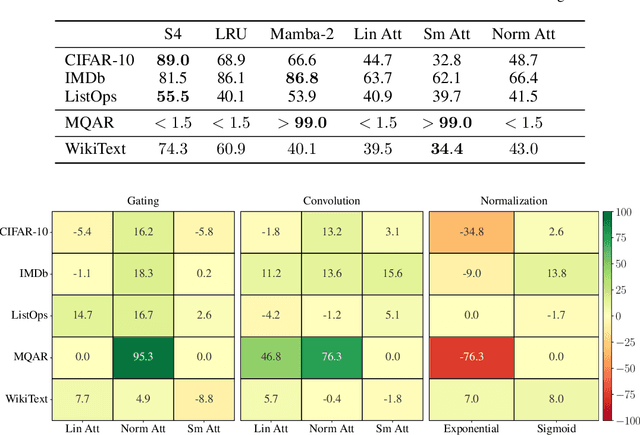
Although softmax attention drives state-of-the-art performance for sequence models, its quadratic complexity limits scalability, motivating linear alternatives such as state space models (SSMs). While these alternatives improve efficiency, their fundamental differences in information processing remain poorly understood. In this work, we leverage the recently proposed dynamical systems framework to represent softmax, norm and linear attention as dynamical systems, enabling a structured comparison with SSMs by analyzing their respective eigenvalue spectra. Since eigenvalues capture essential aspects of dynamical system behavior, we conduct an extensive empirical analysis across diverse sequence models and benchmarks. We first show that eigenvalues influence essential aspects of memory and long-range dependency modeling, revealing spectral signatures that align with task requirements. Building on these insights, we then investigate how architectural modifications in sequence models impact both eigenvalue spectra and task performance. This correspondence further strengthens the position of eigenvalue analysis as a principled metric for interpreting, understanding, and ultimately improving the capabilities of sequence models.
Model Predictive Control with Reference Learning for Soft Robotic Intracranial Pressure Waveform Modulation
Sep 16, 2025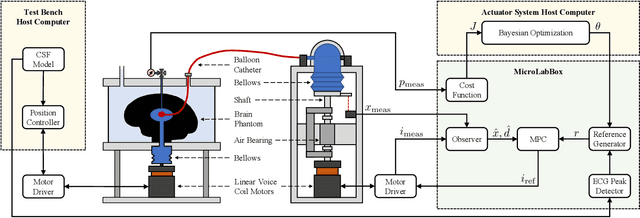
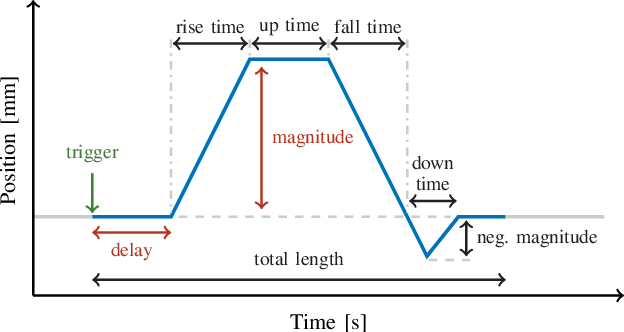
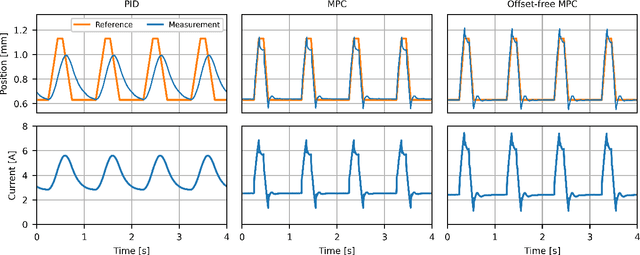
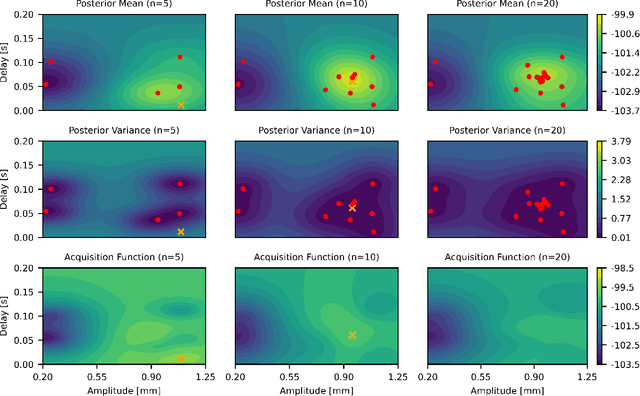
This paper introduces a learning-based control framework for a soft robotic actuator system designed to modulate intracranial pressure (ICP) waveforms, which is essential for studying cerebrospinal fluid dynamics and pathological processes underlying neurological disorders. A two-layer framework is proposed to safely achieve a desired ICP waveform modulation. First, a model predictive controller (MPC) with a disturbance observer is used for offset-free tracking of the system's motor position reference trajectory under safety constraints. Second, to address the unknown nonlinear dependence of ICP on the motor position, we employ a Bayesian optimization (BO) algorithm used for online learning of a motor position reference trajectory that yields the desired ICP modulation. The framework is experimentally validated using a test bench with a brain phantom that replicates realistic ICP dynamics in vitro. Compared to a previously employed proportional-integral-derivative controller, the MPC reduces mean and maximum motor position reference tracking errors by 83 % and 73 %, respectively. In less than 20 iterations, the BO algorithm learns a motor position reference trajectory that yields an ICP waveform with the desired mean and amplitude.
ZipMPC: Compressed Context-Dependent MPC Cost via Imitation Learning
Jul 17, 2025The computational burden of model predictive control (MPC) limits its application on real-time systems, such as robots, and often requires the use of short prediction horizons. This not only affects the control performance, but also increases the difficulty of designing MPC cost functions that reflect the desired long-term objective. This paper proposes ZipMPC, a method that imitates a long-horizon MPC behaviour by learning a compressed and context-dependent cost function for a short-horizon MPC. It improves performance over alternative methods, such as approximate explicit MPC and automatic cost parameter tuning, in particular in terms of i) optimizing the long term objective; ii) maintaining computational costs comparable to a short-horizon MPC; iii) ensuring constraint satisfaction; and iv) generalizing control behaviour to environments not observed during training. For this purpose, ZipMPC leverages the concept of differentiable MPC with neural networks to propagate gradients of the imitation loss through the MPC optimization. We validate our proposed method in simulation and real-world experiments on autonomous racing. ZipMPC consistently completes laps faster than selected baselines, achieving lap times close to the long-horizon MPC baseline. In challenging scenarios where the short-horizon MPC baseline fails to complete a lap, ZipMPC is able to do so. In particular, these performance gains are also observed on tracks unseen during training.
Time-Varying Coverage Control: A Distributed Tracker-Planner MPC Framework
Jul 02, 2025Time-varying coverage control addresses the challenge of coordinating multiple agents covering an environment where regions of interest change over time. This problem has broad applications, including the deployment of autonomous taxis and coordination in search and rescue operations. The achievement of effective coverage is complicated by the presence of time-varying density functions, nonlinear agent dynamics, and stringent system and safety constraints. In this paper, we present a distributed multi-agent control framework for time-varying coverage under nonlinear constrained dynamics. Our approach integrates a reference trajectory planner and a tracking model predictive control (MPC) scheme, which operate at different frequencies within a multi-rate framework. For periodic density functions, we demonstrate closed-loop convergence to an optimal configuration of trajectories and provide formal guarantees regarding constraint satisfaction, collision avoidance, and recursive feasibility. Additionally, we propose an efficient algorithm capable of handling nonperiodic density functions, making the approach suitable for practical applications. Finally, we validate our method through hardware experiments using a fleet of four miniature race cars.