 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMoving Horizon Estimation for Simultaneous Localization and Mapping with Robust Estimation Error Bounds
Nov 20, 2024


This paper presents a robust moving horizon estimation (MHE) approach with provable estimation error bounds for solving the simultaneous localization and mapping (SLAM) problem. We derive sufficient conditions to guarantee robust stability in ego-state estimates and bounded errors in landmark position estimates, even under limited landmark visibility which directly affects overall system detectability. This is achieved by decoupling the MHE updates for the ego-state and landmark positions, enabling individual landmark updates only when the required detectability conditions are met. The decoupled MHE structure also allows for parallelization of landmark updates, improving computational efficiency. We discuss the key assumptions, including ego-state detectability and Lipschitz continuity of the landmark measurement model, with respect to typical SLAM sensor configurations, and introduce a streamlined method for the range measurement model. Simulation results validate the considered method, highlighting its efficacy and robustness to noise.
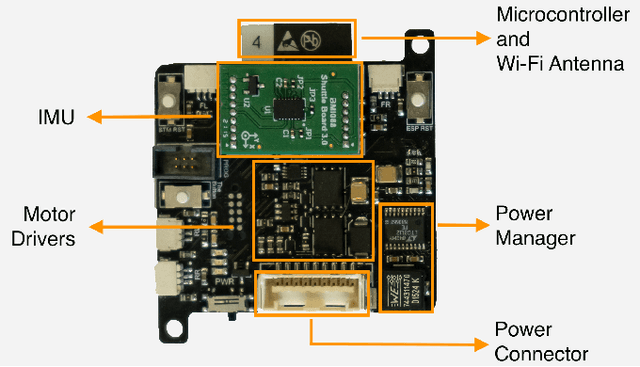
Optimization-Based System Identification and Moving Horizon Estimation Using Low-Cost Sensors for a Miniature Car-Like Robot
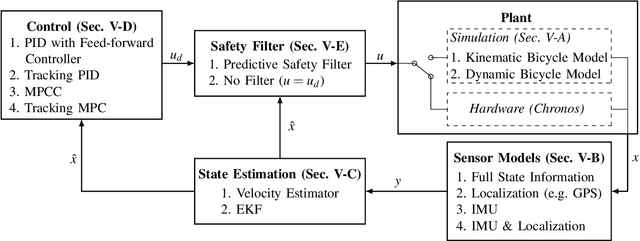
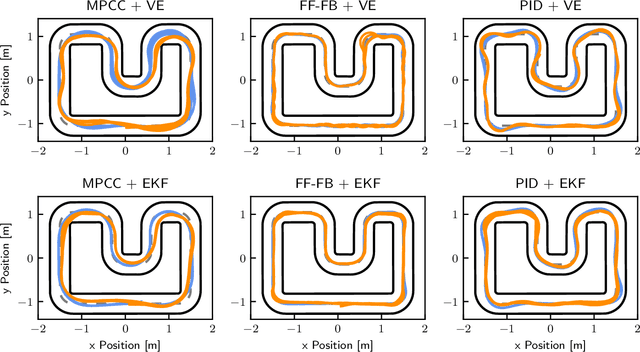
Apr 12, 2024This paper presents an open-source miniature car-like robot with low-cost sensing and a pipeline for optimization-based system identification, state estimation, and control. The overall robotics platform comes at a cost of less than $700 and thus significantly simplifies the verification of advanced algorithms in a realistic setting. We present a modified bicycle model with Pacejka tire forces to model the dynamics of the considered all-wheel drive vehicle and to prevent singularities of the model at low velocities. Furthermore, we provide an optimization-based system identification approach and a moving horizon estimation (MHE) scheme. In extensive hardware experiments, we show that the presented system identification approach results in a model with high prediction accuracy, while the MHE results in accurate state estimates. Finally, the overall closed-loop system is shown to perform well even in the presence of sensor failure for limited time intervals. All hardware, firmware, and control and estimation software is released under a BSD 2-clause license to promote widespread adoption and collaboration within the community.
Chronos and CRS: Design of a miniature car-like robot and a software framework for single and multi-agent robotics and control
Sep 24, 2022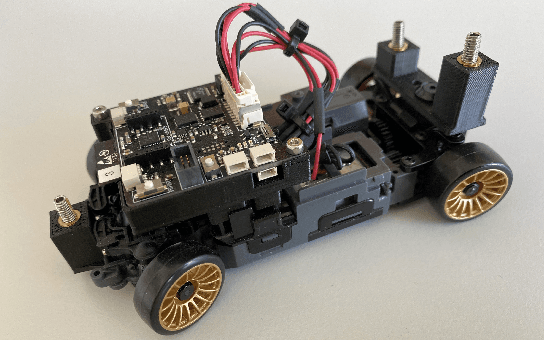
From both an educational and research point of view, experiments on hardware are a key aspect of robotics and control. In the last decade, many open-source hardware and software frameworks for wheeled robots have been presented, mainly in the form of unicycles and car-like robots, with the goal of making robotics accessible to a wider audience and to support control systems development. Unicycles are usually small and inexpensive, and therefore facilitate experiments in a larger fleet, but they are not suited for high-speed motion. Car-like robots are more agile, but they are usually larger and more expensive, thus requiring more resources in terms of space and money. In order to bridge this gap, we present Chronos, a new car-like 1/28th scale robot with customized open-source electronics, and CRS, an open-source software framework for control and robotics. The CRS software framework includes the implementation of various state-of-the-art algorithms for control, estimation, and multi-agent coordination. With this work, we aim to provide easier access to hardware and reduce the engineering time needed to start new educational and research projects.