 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTask-Level Insights from Eigenvalues across Sequence Models
Oct 10, 2025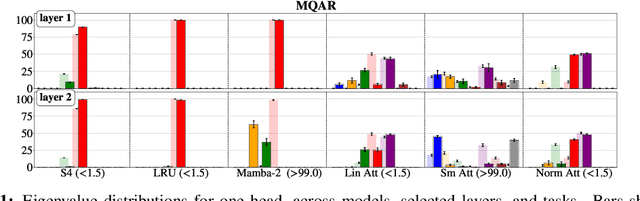
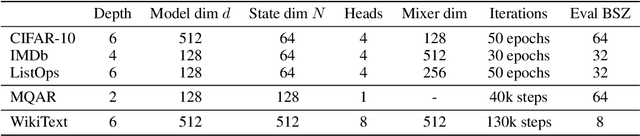
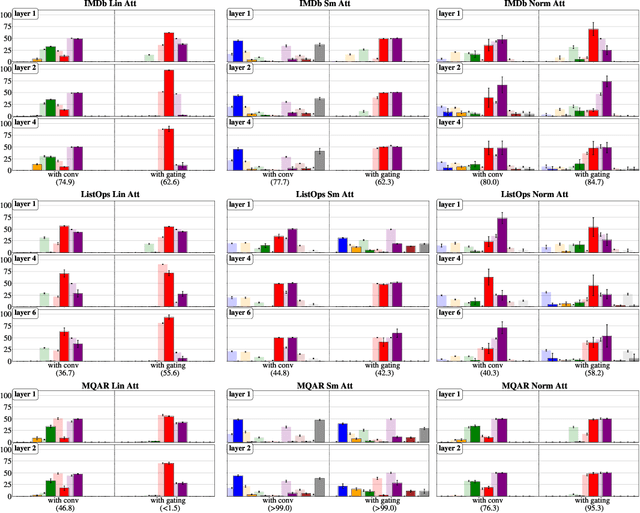
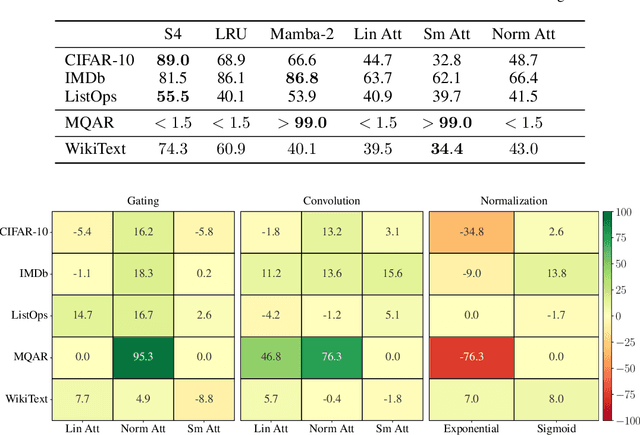
Although softmax attention drives state-of-the-art performance for sequence models, its quadratic complexity limits scalability, motivating linear alternatives such as state space models (SSMs). While these alternatives improve efficiency, their fundamental differences in information processing remain poorly understood. In this work, we leverage the recently proposed dynamical systems framework to represent softmax, norm and linear attention as dynamical systems, enabling a structured comparison with SSMs by analyzing their respective eigenvalue spectra. Since eigenvalues capture essential aspects of dynamical system behavior, we conduct an extensive empirical analysis across diverse sequence models and benchmarks. We first show that eigenvalues influence essential aspects of memory and long-range dependency modeling, revealing spectral signatures that align with task requirements. Building on these insights, we then investigate how architectural modifications in sequence models impact both eigenvalue spectra and task performance. This correspondence further strengthens the position of eigenvalue analysis as a principled metric for interpreting, understanding, and ultimately improving the capabilities of sequence models.
Moving Horizon Estimation for Simultaneous Localization and Mapping with Robust Estimation Error Bounds
Nov 20, 2024This paper presents a robust moving horizon estimation (MHE) approach with provable estimation error bounds for solving the simultaneous localization and mapping (SLAM) problem. We derive sufficient conditions to guarantee robust stability in ego-state estimates and bounded errors in landmark position estimates, even under limited landmark visibility which directly affects overall system detectability. This is achieved by decoupling the MHE updates for the ego-state and landmark positions, enabling individual landmark updates only when the required detectability conditions are met. The decoupled MHE structure also allows for parallelization of landmark updates, improving computational efficiency. We discuss the key assumptions, including ego-state detectability and Lipschitz continuity of the landmark measurement model, with respect to typical SLAM sensor configurations, and introduce a streamlined method for the range measurement model. Simulation results validate the considered method, highlighting its efficacy and robustness to noise.